|
����
�ںܶ�Ƕ��ʽ����ϵͳ�У�ϵͳ��Ҫ��ɴ�������Ϣ�ɼ����ӵ��㷨����Ҫʵ�־�ȷ�Ŀ��ƹ��ܡ�����������Ƕ��ʽLinux����ϵͳ��arm9����������źŲɼ���ʵ���ϲ�����㷨������DSPоƬ�����ϲ��㷨�õ����Ʋ�����DSPоƬ���ݻ�õIJ������²�����㷨ʵ�־�ȷ���ɿ��ıջ����ơ�
1 ���ϵͳ���
�ö������ϵͳ��arm9������s3c2440Ϊ���ģ�����I2C���߹��ض��DSPоƬTMS320F28015��ΪЭ��������������������ϵͳ�ĺ��ġ�
1.1 S3C2440��TMS320F28015���
Samsung��˾�Ĵ�����S3C2440���ڲ�������ARM��˾arm920T�������ں˵�32λ����������Դ�ḻ����������16
KB��ָ��Cache��16 KB����Cache�������Ƶ�ɴ�400 MHz.��ӵ��130��ͨ��I/O��24���ⲿ�ж�Դ�Լ��ḻ���ⲿ�ӿ���ʵ�ָ��ֹ��ܣ�����֧�ֶ������ܵ�I2C���߽ӿڡ�3·URAT��2·SPI������ͷ�ӿڵȡ�
TMS320F28015�����¼��F28015����TI��˾��32λ��������������ǿ��Ŀ��ƺ��źŴ����������ܹ�ʵ�ָ��ӵĿ����㷨��Ƭ��������Flash�洢����I2C����ģ�顢���ٵ�A/Dת��������ǿ��CAN����ģ�顢�¼������������������·�ӿڼ���ͨ�����崮�ڵ����裬���������ܹ������ʵ�ֹ��ܵ���չ��ͬʱ�����ٵ��ж���Ӧʹ���ܹ������ؼ��ļĴ��������٣���С���ж���ʱ������Ӧ�ⲿ�첽�¼���
1.2 I2C���߽ӿ�
I2C������һ������IC����֮�����ӵĴ������ߣ�����SDA�������ߣ���SCL��ʱ���ߣ���������ÿ������I2C���߽ӿڵ�������ģ�顣���е�8λ˫�����ݴ������ڱ�ģʽ�¿ɴ�100
kb/s������ģʽ�¿ɴ�400 kb/s.�������������ͨ��I2C���߽ӿڷdz������������һ��ϵͳ�������ݵ�ַʶ��ÿ���������������߽ṹ�����ߺ����������٣������������ṹ���ա�����乹��ϵͳ�ijɱ��ϵͣ�������������������������Ӱ��ϵͳ���������������е�I2C������������һ�����ߣ������ϵͳ�ĺͿ���չ�Ժá�
���߱�����������ͨ��Ϊ�����������ƣ�������������ʱ�ӣ� SCL�� �������ߵ����ݴ��䣬��������ʼ��ֹͣ������SDA
���ϵ�����״̬����SCLΪ�͵�ƽ���ڼ���ܸı䣬SCLΪ�ߵ�ƽ���ڼ䣬SDA ״̬�ĸı䱻������ʾ��ʼ��ֹͣ������I2C������ʼ��ֹͣʱ����ͼ1��ʾ��
ͼ1 I2C������ʼ��ֹͣʱ��
1.3 Ӳ����·
S3C2440��F28015������������I2C����ģ�飬֧�ֶ����豸I2C���ߴ��нӿڣ����Է���عҽӵ�I2C�����ϡ���ˣ�����֮���I2C���߽ӿڵ�·����Ʊ��ʮ�ּ�ֻҪ�����ߵĶ�Ӧ����I2C_CLK����ӦI2C�����е�SCL�ߣ���I2C_SDA����ӦI2C�����е�DATA�ߣ������������ɡ�S3C2440��TMS320F28015��Ӳ���ӿڵ�·��ͼ2��ʾ��
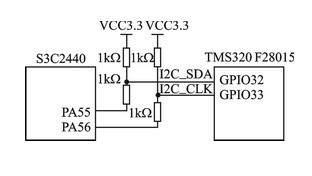
ͼ2 S3C2440��TMS320F28015��Ӳ���ӿ�
��·S3C2440��PA55��PA56���ŷֱ��ӦI2C_SDA��I2C_CLK����F28015��GPIO32��GPIO33Ҳ���Էֱ���ΪI2C_SDA��I2C_CLK.���ǵ��迹��ƥ������ػ�Ӱ���������ݴ���Ч��������ڽ�����оƬ��I2C_DATA��I2C_CLK����ֱ��ʱ����ֱ����·�ϸ�����һ��С���衣
I2C_SDA��I2C_CLK��˫���·�����붼ͨ��һ������Դ�������������ӵ�����Դ��ѹ�ϡ�����S3C2440��F28015������ߵ�ƽ��Ϊ3.3
V��������Ӳ�����ʱ��I2C_SDA��I2C_CLK����ͨ�������������ӵ���3.3 V��VCC��Դ�ϡ�
2 arm��DSPͨ���������
����Linux����ϵͳ��arm��������Ϊ���������������ݹ�������������ȵȷ������������ƣ����Ժܺõ���֯��Χ�����ɼ������ݣ���Ҫʵ�ֶ�ϵͳ��������ƣ���ͨ�������豸�����������I2C����ģ�飬ͨ������Ѱַʵ����I2C�����Ϲ��ص��²�DSP�������շ���Ϊ��֤����ͨ�ŵ�ʵʱ�ԣ�F28015ͨ���ж���Ӧ�ķ�ʽʵ�����ݽ��պͷ��͡�
2.1 arm9ƽ̨��Ƕ��ʽLinux��I2C�����������
2.1.1 I2C���߶�дʱ��
arm9��������Ϊ������ӻ�DSPд���ݣ�������ӻ����������źţ�Ȼ����7λ�ӻ���ַ��1λд��־λ���ٵȴ��ӻ���Ӧ���źš����յ�Ӧ���źź������������ݸ��ӻ����ٴεȴ�Ӧ���źš��������յ�Ӧ���ź�֮���ٴη������ݡ�֮�������ȴ��ӻ���Ӧ���źţ����ֱ�����ݷ�����ɣ���������ֹͣ�źš�I2C����д����֡��ʽ��ͼ3��ʾ��
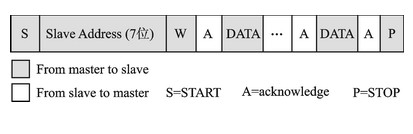
ͼ3 I2C����д����֡��ʽ
��ģʽ�¶����ݣ���ָÿ�δ�ָ����λ�ö�ȡһ�������ֽ����ݡ�����������ӻ����������źţ�Ȼ����
7λ�ӻ���ַ��1λ����־λ���ȴ��ӻ�Ӧ�𡣵��յ��ӻ���Ӧ���źź����������մӻ����͵����ݣ�������ɺ���һ��Ӧ���źţ����ֱ�����ݽ�����ɣ���������һ��ֹͣ�źš�ͼ4ΪI2C���߶�����֡��ʽ��
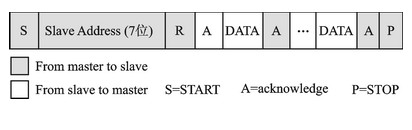
ͼ4 I2C���߶�����֡��ʽ
2.1.2 Linux��I2C���������������
Linuxϵͳ��I2C��������������ϵ���ṹ��ƣ�����I2C����������������I2C�����豸��������������ʵ�ֶ�I2C������������S3C2440��I2C����ģ�飩�Ŀ��ƣ��豸����ʵ�ֶԾ����豸��F28015��I2C����ģ�飩�Ķ�д���ơ�ͼ5Ϊ����������ܣ����Է�Ϊ������Σ�
�� I2C��ܡ��ں���i2c.h��i2c��core.cΪI2C���߿�ܵ����壬�ṩ�˺������ݽṹ�Ķ��塢I2C�����������������豸������ע�ᡢע��������I2C����ͨ�ŷ����ϲ�ġ�������������صĴ��롢����豸��ַ���ϲ����ȡ�i2c��dev.c���ڴ���I2C�������������豸�ڵ㣬�ṩI2C�����豸���ʷ����ȡ�
�� I2C����������������������������I2C���������������ݽṹ��ʵ���ھ���I2C�����������ϵ�I2C����ͨ�ŷ�����
�� I2C�����豸�������������������豸�����ݽṹ������I2C���߿�ܵ���غ���ʵ���豸��ע�ᣬ��Ϊ�û��ṩ�ϲ�Ӧ�ó����̽ӿڡ�
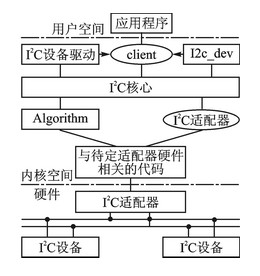
ͼ5 �����������
Linux��I2C������������е���Ҫ���ݽṹ������ i2c_driver��i2c_client��i2c_adapter��
i2c_algorithm�����DZ��������ں��е�i2c. hͷ�ļ��С�i2c_adapter��Ӧ�������ϵ�һ������������i2c_algorithm��Ӧһ��ͨ�ŷ���������Ϊ�������ṩͨ�ź�����i2c_algorithm�еĹؼ�����master_xfer�������ڲ���I2C���߷���������Ҫ���źţ���i2c_msg����I2C������Ϣ��Ϊ��λ���ýṹ��ԭ�����£�
struct i2c_msg{
_ _u16 addr;/*�豸��ַ*/
_ _u16 flags;/*��־*/
_ _u16 len;/*��Ϣ����*/
_ _u8 *buf;/*��Ϣ����*/
}; |
i2c_driver��Ӧһ�����������������ڸ������õ����ݽṹ��i2c_client��Ӧ����ʵ�������豸��ÿ��I2C�����豸����Ҫһ��i2c_client��������i2c_adapter��i2c_client�Ĺ�ϵ��I2C����Ӳ����ϵ�����������豸��ϵһ�£���i2c_client������i2c_adapter.
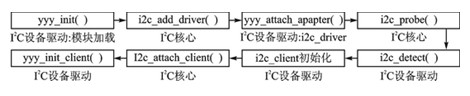
ͼ6 �豸����ģ���������
��Linux�ں�Դ������driversĿ¼�µ�i2c_dev.c�ļ�����ͨ�õ�I2C�����豸�����ļ���ΪӦ�ó����ṩopen������write������read
����ioctl������close�����Ȳ����ӿ��������豸��Ӧ�ò���Խ�����Щ�ӿڷ��ʹҽ����������ϵ�I2C�����豸�Ĵ洢�ռ��Ĵ�����������I2C�����豸�Ĺ�����ʽ
2.1.3 S3C2440��I2C��������
�豸����S3C2440�ڲ���I2C���߿�����ͨ��4���Ĵ���ʵ�ֶ�ͨ�ŵĿ��ƣ��ֱ���I2C���ƼĴ�����I2CCON����I2C״̬�Ĵ�����I2CSTAT����I2C�շ�������λ�Ĵ�����I2CDS����I2C��ַ�Ĵ�����I2CADD����
����Linux��I2C���߿��Ҫ��S3C2440��I2C�������������Ҫ������¹��������i2c_adapter_s3c_init����ģ����غ����Ͷ�Ӧ��i2c_adapter_s3c_exit����ģ��ж�غ��������i2c_adapter_s3c_xfer����ģ��S3C2440������ͨ�ŷ���������
i2c_adapter_s3c_init����ͨ��ע��s3c2440_i2c_driver�ṹ��ʵ������������ƽ̨ע�ᣬs3c2440_i2c_driver�ṹ������˾�����������probe����������remove����������resume��������ָ�����Ϣ���������£�
static int _ _init i2c_adap_s3c_init����{
int ret;
ret=platform_driver_regisiter��&s3c2440_i2c_driver����//ע��platform_driver�ṹ��
if��ret==0��{//ע��ʧ��
ret=platform_driver_regisiter��&s3c2440_i2c_driver����
if��ret��
platform_driver_unregisiter ��&s3c2440_i2c_driver����
}
return ret;
}
static struct platform_driver s3c2440_i2c_driver={
.probe=s3c24xx_i2c_probe��
.remove=s3c24xx_i2c_remove��
.resume=s3c24xx_i2c_resume��
.driver={
.owner=THIS MODULE��
.name=��s3c2440��i2c����
}��
} ; |
�����S3C2440��I2C��������������ע��Ϳ��Խ������豸����ע�ᵽ������ƽ̨�ϣ�ʵ��I2C��������ͨ�š�i2c_dev.c�ļ����ں�Դ���ṩ��ͨ��I2C�����豸�����ļ������ÿ��I2C��������������һ�����豸��Ϊ89���豸�ļ����豸����ģ�����������ͼ6��ʾ����ɼ��غ������ṩi2cdev_read������i2cdev_write������i2cdev_ioctl������������Ӧ�û��ռ��read������write������ioctl�������������û�ʹ�á��û�ͨ����Щ�ӿں���ʵ��I2C�������ݵĶ�д���ܡ�
2.2 DSP���ݽ����жϳ������

ͼ7 I2C�����жϷ����������
ͨ������F28015��I2Cģ��Ĵ���������I2Cģ��Ϊ�ӹ�����ʽ��ͬʱ����I2C�����ж���Ӧ����ʵ�ֶ����������ݵĽ��պͷ��ͣ������������ͨ�š�F28015������I2C�����жϺ�ִ���жϷ������ͼ7ΪI2C�����жϷ���������̡�
�жϷ������ͨ����ѯ״̬�Ĵ�����I2CSTR����־λ���ó��ж������룬Ȼ�������Ӧ���ӳ���������ݽ��շ��͡��������£�
interrupt void i2c_int1a_isr��void�� {//I2CA���ж���Ӧ����
Uint16 IntSource;// ��ȡ�ж���
IntSource=I2caRegs.I2CISRC.bit.INTCODE & 0x7;//I2CA�ж�Դ������3λ
switch��IntSource��{//���ж�Դ��ȷ����ؽ��պͷ��Ͳ���
case I2C_NO_ISRC://=0
case I2C_ARB_ISRC://=1
case I2C_NACK_ISRC�� //=2
case I2C_ARDY_ISRC�� //=3
case I2C_SCD_ISRC://=6
case I2C_AAS_ISRC://=7
break;
case I2C_RX_ISRC://=4����������������
DataReceive������//�������ݽ����Ӻ�����������
break;
case I2C_TX_ISRC://=5����������������
DataTransmit������//�������ݷ����Ӻ�����������
break;
default��
asm����ESTOP0������ //��Ч���ݣ���ֹͣ
}
PieCtrlRegs.PIEACK.all=PIEACK_GROUP8;
} |
F28015�е����ݽ����ӳ�������ݷ����ӳ�������I2C���ߵ��жϷ�������и��ݲ�ͬ��״̬����е��ã�����������ͨ�ų���ĺ��IJ��֡����ݽ����ӳ�������ݷ����ӳ����������ͼ8��ʾ��
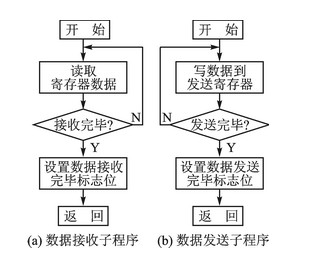
ͼ8 ���ݽ��պͷ����ӳ���
3 ���Խ��
ͨ��NFS�ļ�ϵͳ�������ģ���I2C�������������豸�������ص�����Linux����ϵͳ��S3C2440ƽ̨�ϣ��ȼ����������������ٽ�F28015�IJ��Գ�����д��RAM�С�����F28015�ȴ�I2C�����ϵ����ݣ���ִ��Linuxϵͳ�е�I2C���߲��Գ����Խ����ʾ��оƬͨ��I2C���߽ӿ����������ͨ�ţ��������õ�ʵʱ�ԺͿɿ��ԡ�
4 ����
���������I2C����ʵ����ARM9��������DSPоƬ��ʵʱ�ɿ�������ͨ�š�ARM9���������Linux����ϵͳ��Ϊ�ϲ���ƺ��ģ�DSPоƬʵ���²�����㷨���ɳ�ַ���arm9�����������ݲɼ�����������ȷ���������Լ�DSPоƬ���㷨ʵ�ֺ͵ײ���Ƶij����� |


