|
�����ּ��������������������Ĵ��������Ѿ�������100 k�����ϡ�Ȼ��������������ߵļ�����ļ���������ԶԶ������������Լ����ٶ���ֹ������
�ڿ�ѧ���㡢���ʷ���������Ԥ�⡢����ģ�⡢ͼ�����Լ�ʵʱ�źŴ������Լ���������ٶȵ�Ҫ����Ϊ���С����Ű뵼�弼����Ѹ�ٷ�չ�����ó����ģ���ɵ�·��ƵĴ�����Ԫ����Խ��Խǿ��Ȼ�������������ܵ�����ܵ���������ơ���ˣ�����������ٶȵľ�����Ŀǰֻ��ͨ�����д���������ʵ�֡�
1 ����
�����������һ�ֲ����źŴ���ϵͳ������Ҫ�ص��ǣ�
��1������ǿ��Ĵ���������������ɶ����źŴ���ģʽ��
��2���źŴ�������ͨ�������źŴ���оƬ��DSP���IJ��м�����ɡ�
��3���źŴ������ܵĸı�ͨ������ʵ�֡�
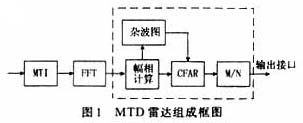
ͼ1��ʾ���Ƕ�Ŀ�����״��źŴ���������Ҫ��ɲ��֣������еĴ���ģ���DZ���Ҫ��ɵĹ�����
2 ������㡢CFAR��⡢M/N���
2.1 �������
�������ָ�Ӹ����ݼ�������Ⱥ���λ����ʹ��
2.2 CFAR����M/N���
�״��źŵļ�������ڸ��ű����Ͻ��еģ�Ϊ����ǿ��������ȡ�źţ�����Ҫ����һ��������ȣ����ұ����к��龯�����豸�����龯������Ŀ���DZ����źż��ʱ���龯�ʺ㶨����������ʹ�������������龯̫������ء�
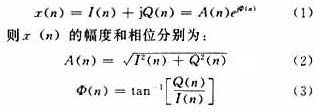
��1����Ԫƽ�����龯��CFAR�������
�Ѿ�֪�����ڵͷֱ��ʵ������״��У����˺���ѩ�ȷֲ��Ӳ����Կ����ܶ�������䵥Ԫ�ز��ĵ��ӣ�����Ӳ�����ķֲ����������ֲ��������ⱳ���д��ڴ����Ӳ������������ͨ�������Ӳ��ľ�ֵ�õ������������Ӳ��ڿռ�ֲ���δ֪�ԣ����Ӳ���ֵֻ�ܴӱ����Ŀ���ڽ���Ԫ����ã�����DZȽϳ��õĵ�Ԫƽ��CFAR�������Ϊ�˼��������������Ӳ���Ե�ڲ��龯�����������⣬һ�������Ľ���·-���Ԫƽ��ѡ���·����ͼ2��ʾ���ڱ���ⵥԪ�����ߣ�Ϊ�˷�ֹĿ�걾��������ֵ��Ӱ����ճ���һ��������Ԫ��
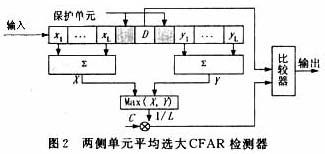
��2����άCFAR�����
���״﹤����FFT��ʽʱ��CFAR��������������ݰ��������Ƶ��2��������������Ҫ���ö�άCFAR,��ͼ3��ʾ����0#
�˲���������Ӳ�ͼ�����⣬�����ಷ���˲����������һ����Ԫƽ��CFAR���������CFAR���Ľ����������ΪĿ���жϡ�
��3��M/N���
M/N�����CFAR������У����У�NΪ������������MΪС��N��ֵ�������趨M/N������Ϊ2/3,����ͬ�����ŵ��ź���3�������ظ�����������2�ι������ж���Ŀ�ꡣ
2.3 �Ӳ�ͼ
�Ӳ�ͼ�������ǽ��״���Χ�Ķ�άƽ��ֳ����λ���뵥Ԫ���ѷ�λ���뵥Ԫ�Ľ����źŴ���һ���洢���У�ÿ���洢��Ԫ��Ӧһ����λ���뵥Ԫ�������������ߵ�ɨ�裬ÿ����Ԫ�洢���źŽ��е��Ƹ��£�

���У�K��һ��С��1�����ӣ�xn��yn�ֱ�������롢�����
�������߶�Ȧɨ���Ժ��Ӳ�ͼ�д���������Ӧ��λ���뵥Ԫ���Ӳ���ֵ���������H����ʽ
��5�����㣬���������ź�xn��������H,���Ǿ���Ϊ��Ŀ�꣬���������Ŀ�ꡣ
H=Cyn��5��
���У�CΪһ�������ӣ�C�Ĵ�С�����ż����ʵ��龯���ʡ�
3 ϵͳ�����
���д�����Ŀ����ͨ�����ö��������Ԫͬʱ�������������������ִ��ʱ�䣬���������̵�ʱ����������Ϊ���д��������������ĵ����⣬����һ����ķ�ӳ�����ڴ�������2����������ָ�꣺���ٱȺͲ���Ч�ʡ������д���������2���������ܾ�������ɲ��д�������3��Ҫ�أ�������Ԫ�����д���������ṹ�������㷨�����������䷽��������֮�������ϵ������������
3.1 ������Ԫ��ѡ��
������Ԫ�����ܿ���˵�Ǿ�����������������������أ������ܵĴ�����Ԫ�������ϵͳ���ܡ�����ϵͳ������ġ����ͽṹ�����Ժ����������ά���ԡ�������Ԫ��Ӧ�÷�Χ���¿ɷ�Ϊ���봦����Ԫ��ר��ASICоƬ��FPGA/EPLD�������źŴ���������ʵʱ�����źŴ���Ӧ���ϣ�DSP�Ծ߱��������ơ�
�ڲ��д����У���ǿ��DSP�Ƿ�������ڹ��ɲ��д�����������ܣ������ͨ�ſڵ�ͨ�������������������Ľӿڹ��ܵȡ�TMS320C40��ADSP21060�ڽṹ�������кܶ�����֮������Ƚ϶��ԣ��ۺ����ܽϺõز���DSP��ADSP21060,���������ٶȡ���������������Ƭ�ڴ�����������Զ����TMS320C40,�������������DSP.����ͻ���ص��ǣ�FFT�ٶȿ졢Ƭ�ڴ����������ܺõع����������ӿڡ����ּ����ͺ�ADSP2106X��ѡ�����Ҳ�ϴ������������Ƴ���ADSP21160������ݣ��ṹ��ӿ���ʽҲ���ơ�
3.2 ���д����������ṹ
���д����������������Ҫ������Ϊ��������Ԫ�ṩ���ݽ�����ͨ·�������������ͺͿ��Ƶ����źŵĴ��ݡ�������Ԫ֮�������ṹ���¿ɷֳ�2�ࣺ
��1���������ߣ�������������ϵͳ����Ϊ�����ʽ����ϵͳ��
��2��������Ԫ�и��Զ��������ݴ�������ͨ��ͨ�ſ������ķֲ�ʽ����ϵͳ���ֳ������ʽϵͳ�������ʽ�Ĺ�������ϵͳ�ڴ�����Ԫ�������ٵ�����£�������������ͨ�Ŷ��ܻ�ýϸߵļ��ٱȡ���������Ԫ�����ܶ�ʱ���������߽����Ƶ�������߳�ͻ�͵ȴ������ҹ������߽ṹ�Ŀ������Ժ�����Բ����ֲ�ʽϵͳ�������ڴ��ģ���д���ϵͳ�����ع��������ݴ�������Զ����ֲ�ʽϵͳ��
ͨ�ò���DSP��ͨ�ſ��ٶ���30~60 MHz,��Ϊ�ڴ�����Ԫ��Ŀ�ܶ�Ĵ��ģ���д������÷ֲ�ʽϵͳ��ƴ�����������TMS320C40��ADSP21060�ṩ�Ķ��6������ͨ�ſڵ���ͨ����������ָ���ٶȻ�ƽ�����������൱����ͬʱTMS320C40��ADSP21060���ṩ�˹����������ߵĽӿڣ�TMS320C40��2���������ߣ�����һ�������ں�����TMS320C40�������ݣ���ADSP21060��Ƭ�ھ��й��������ٲ��������������������ⲿ���Ƶ�·������£���������6��ADSP21060ֱ��������
���Ϸ����������ֲ�ʽ����ϵͳ���ʺ��ڴ��ģ����ϵͳ������������ʽϵͳ��С��ģ�IJ��д������Ͽ��Եõ��ϸߵ����ܡ���ADSP21060Ϊ������������ԪС��5ʱ��������ϵͳ��Ч�ʽϸߣ���֮���ֲ�ʽ����ϵͳ�����á�
3.3 �����㷨�����������������
�����㷨�ĺû���Ҫ���䲢�жȸߵ��������������㷨�Ͳ��г������Ƹ��Ӷ�Զ���ڴ�ͳ�Ĵ����㷨�ʹ��г�����ƣ�������������ڴ������ṹ�����еIJ����㷨Զ�������㲢�д�������Ҫ������Ŀǰ��ȱ��һ����Ч�IJ��п���ϵͳ�Ͳ���������ԣ��������״��źŴ�����һ������˵���źŴ�����������ͻ�������ȷ���ģ������С������ߵ���Ʒ�Χ���Ӷ��������˳�����Ƶ��Ѷȡ�
�������������IJ���DSP��Ϊ������Ԫ���ɵ��źŴ�����������ȫ�ɱ�̺����������صģ�������Ҫ���ԶԲ�ͬ������ģ�����½��й��ܶ��塣�㷨�����Ա�ģ������DSP��RAM��ROM�У���������Ԫ�Ĺ��ܸı�ʱ���ɵ�����Ӧ������ģ�顣
�������͵������Dz��д���ϵͳ��Ƶ�һ�����⣬��������ʵ�õ������Զ����䷽��������������������ijɱ���̫�ߡ������״��źŴ������е��ص㣬���Խ��䶨��ɴ����������������ģ�飬ÿ��ģ����������������IJ�ͬ�����������������ʱ�䡢����ͨ��ʱ�䡢����ͨ��·��������ͬ��
����������ȫ�����ķ�ʽ�ǽ����������е�ȫ�����ݷָ��һ����С�����ݰ�����ÿ�����ݰ��У�����ʵ�����ݻ�������������Ϣ�����ݰ����ȡ�������ʽ������������У���롣������ʽ�к����㹻�Ĵ�����Ϣ������ָʾDSP����ģ����δ����˰����ݣ���ѡ��������˲���MTI��CFAR�ȡ�����������Ϣ��ϸ�ظ����˴˰����ݵ��ص㣬������������ֹ�š������պš�ͨ���ŵȡ�DSP���յ�һ�����ݰ�������˰����ݵĴ���������������ݰ��Ƕ����ģ������������д���������ȴ����������ݵ������������DSPת����
4 ϵͳ��ʵ��
���ȹ���һ�µ�Ԫƽ�����龯�������������������루���120 km,7
MHz�����ʣ�������Ϊ5.6 k��������1ƬADSP2106X������Ҫ��ʱ���Լ��3.6 ms,������ɴ�������Ϊ1
ms,��������ھ����Ϸֳ�4�Σ��ֱ���4ƬADSP2106X��������������0.1 ms�Ŀ���ʱ�䡣����Ϊ��ÿƬDSP�������ݷ��㣬��Ҫÿ�δ������������˶μ�Ҫ���ص����Ա�֤ÿһ��CFAR�����ҵ�Ԫƽ�����Զ������С�
��1�����ں��龯���Ĵ�����˵��ֻ��2�ֹ�����ʽ��MTI��MTD,�ֱ��Ӧ��Ԫƽ�����龯���Ͷ�ά���龯��⡣
��2��ϵͳ�ڸ����־�������������ʽ���������ݰ��ĸ�ʽΪ������4���ֵ�ģʽ�����֣�Ȼ����ʵ�����ݡ�ÿһ�ֹ�����ʽ����Ӧ������ÿһ���ݰ�ǰ���ģʽ�����ָ�������Ӧ��ģʽ�������еĹ�����ʽ�������ȸ����ò��֣��������������㵥Ԫ�ж�����н��ͣ��Ա�ת����Ӧ���ӳ���
��3��ϵͳ��ʼ����ʽ�����֣�һ����EPROM���ط�ʽ���˷�ʽ������������ϵͳ���Ի�̶��״﹤����ʽ���ѿ���������С���һ�ּ��ط�ʽ����ͨ��������ӿ���Link�ڼ��ط�ʽ���м��ء�Ϊ��ʹ��ʱ�����״��źŴ�����ʽ�����ü�������ط�ʽ��
4.1 ϵͳӲ��
�����������ͺ��龯�������Ĵ洢�������Ƴ��豸��Ϊ5ƬDSP,��ͼ4��ʾ��
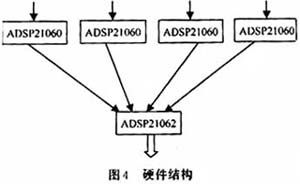
�����״��źŴ�����ˮ���е��ص㣬�����������̽�����ϵͳ���ֳ����ɹ��ܿ飬��������÷ֲ�ʽ���д���ϵͳ���ֲ�ʽ���д���ϵͳ�ɱ��IJ�����ģ�鹹�ɣ����龯�����ģ����4����Ԫ���ɣ�M/N��������ģ��Ϊ1����Ԫ��������ģ��֮���ɸ���ͨ�ſ�������ÿ��ͨ�ſڼ����ݴ������ʿɴ�40
Mb/s.����DSP����ͨ�ſ�ͨ����·��������ӵ��ⲿ��������������ʽ����Ӧ�������������ڽ���·��佨������ͨ·�����������˵�·����ź���ϡ�
4.2����������ʵ�ַ���
������ɣ�CFAR��������㡢M/N���ȹ��ܣ���Ҫ5ƬDSP.
���������4�Σ��ֱ���4ƬDSP�н���CFAR���������ȴ������μ����ص����Ա�֤ÿһ��CFAR�����ҵ�Ԫƽ�����Զ������С����4�εĽ������һƬDSP���кϲ���M/N��⣬��Ŀ����Ϣ���͡�
��1��CFAR,�������
�Ӳ�ͼ���龯������Ҫ������������Ӧ��λ���Ӳ�ͼ�����Ϊ���ޣ�������˲��������뵥Ԫ���м�⡣�����˲���������õ�Ԫƽ��CFAR����������ÿ�����뵥Ԫ���м�⣬ͬһ�������ŵĪ�N-1���ಷ��ͨ�������ѡ����ΪCFAR������������Ӳ�ͼ�����������ź���Ϊ���ռ�������������Ŀ�����ʱ���������ֵ����λ��Ϣ��
�������̷ֱ��LINKX���ո��Զε����ݣ��ȶ�������CFAR��������Ŀ������Ӧ����/�����յ�Ԫ��Ϣ���ȵ��������ݶ�������ѽ��ͨ��LINKX������һ����������������ͼ5��ʾ��

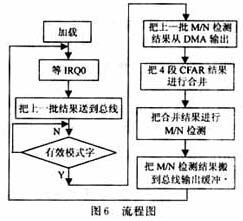
����IRQ0����ɴ������ڵ���ʼ�źţ�ģʽ�ֵ���Ч��ͨ��У����ʵ�֣�����ͨ�ſ�LINKX������DMA��ʽ��
��������������ݸ�ʽ������������4���ֵ�ģʽ��������ʵ���鲿����ĸ���������ͬģʽ�йأ�ÿ��������Ӧһ������/�����յ�Ԫ��CFAR�������ʽ��������4���ֵ�ģʽ������ֵؼ�Ŀ��ĸ����������Ǹ�Ŀ�굥Ԫ��Ϣ��
������һ���������32��FFT����´洢����ԼΪ90 k������������DSPоƬѡȡ���ڴ�ϴ��ADSP21060.
��2��������M/N���
��һ���Ļ��������ǰ�4�ε�CFAR������ϲ���һ��ֻҪ�Ѹ����и���Ŀ�굥Ԫ���ݾ����ŵ�λ�ü���������Ȼ��ᵽ��һ�����������ɡ���ʱĿ����Ϣ���е�˳���ǰ������ź����ε����ģ��Ȱ�����������Ͼ����ź���С�ĵ�1�Σ��ٰ��2,3,4�Ρ�
M/N�������ɴ������ڼ���У�����������3����ɴ���������������2����ͬһ���������ϼ�Ŀ�꣬ȷ��Ϊ���Ӧ���뵥Ԫ����Ŀ���������ʱ������Ӧ��Ԫ�����µķ�ֵ��Ϊ�������
����������ͼ6��ʾ���ֱ��LINK2,LINK3,LINK1,LINK5����4��������ϵļ��������4�εĽ���ϲ���һ���γ���������������Ľ����Ȼ�����ǰ2�μ��Ľ������M/N��⣬����M/N���Ľ��ͨ��LINK0�����ӿڰ塣
�Ķε��������ݸ�ʽ��ͬ����4���ֵ�ģʽ������ֵؼ�Ŀ��ĸ����������Ǹ�Ŀ�굥Ԫ��Ϣ���洢������ѡȡ���ڴ��С��ADSP21062.
4.3 ���������ڴ桢ͨѶ��Դռ�����
��CFAR����У�������ಷ��ͨ����������������Ӧ��λ���Ӳ�ͼ��Ϊ�����м�⣬ʣ���˲����ھ����ϵĵ�Ԫƽ�����龯��⡣����������Ҫ�����ڵ�Ԫƽ�����龯�У�������˵�1�����뵥Ԫ���˸����辭L������ƽ���⣬�ڵ�2�������ź��������뵥Ԫ���ʱ��ǰ���L����ƽ��ֻ�����1�����ƽ���ֵ����ȥ�Ƴ���ֵ���ɣ�������ÿ�������ż����˵ֻ��Լ8��ָ����ܲ����������������ڻ���Ҫ����ǰһ���ڶ�DSPоƬ���ݣ���˴˴�����ͨ�ų�����û�������ĸ�ͨѶ֧·��������ת������ǰһ�����㲿���ڻ��漰ʱ����Ҫ���˲�������һ��������
CFARһ����32��MTDģʽ�´洢ѹ���ϴ���˲�ȡ�����´�ʩ������/����Լ��м������Ƕ��ֶ����ʽ���ڿ�ʼCFAR���ǰҪ��ת���ɳ��ֵĸ����ʽ���и������㣬����CFAR�������������ת����Ϊ16
B�����ʽ�������������ಿ�ֵ�����Ҳ��Ҫ�Ȱ�CFAR���ת����32 B�����ʽ���������������õ��ӳ����ڲ���ɵġ���Ϊ������м�����Ŀ�굥Ԫ��ֵ�Ĵ洢ʹ����ѭ��Ѱַ��ʽ����Ϊһ��������һ�߱����д�����ͬʱһ�ᱻ���������ݸ��ǵ�����һ�������Ծ����ŵ�˳����еģ���CFAR���Ҳ�����ž����Ż����ģ��ڶԵ�18�ž����ż��ʱ����0�ž����ŵ����ݾ�û���κ���;�ˣ������Ϳ��ѵ�18�ž����ŵķ�ֵ�浽��0�ž����ŵ�λ�á�ͬ���ص�19�ž����ŵķ�ֵҲ���Դ浽��1�ž����ŵ�λ�ã��Ӷ�������ѭ��Ѱַ�洢��ʽ������һЩ�м���Ҳ���������ִ洢��ʽ����Ч�ؽ�ʡ���ڴ���Դ��
CFARһ��������Ԫƽ�����龯���ͷ������2���֣���������Ҫ������ǰһ���֣�ռ90%���ң���������������Ѿ��������ˡ�����һ������������Ҫ������M/N��ⲿ�֣����ܵ�����������
5 ����
����������һ�ֺ��龯���IJ��д���ϵͳ����ƣ�ѡȡͨ�ò���DSP��Ϊ���Ĵ�����Ԫ��ͨ����������ͨ�ſڹ���������ϵķֲ�ʽ����ϵͳ���ڴ�����Ԫ��Ŀ�϶������»���˺ܸߵ����ܡ�����״��źŴ������ص��������з��䣬����������������ʽ��ǿ���źŴ���ϵͳ��ͨ���Ժ���ά���ԣ�����ϵͳ�������õĿɱ�̡�����չ������������ |


