| ұајӯНЖјц: |
ұҫОДЦчТӘҙУПөНіЈ¬ЙијЖәНКөПЦ3ёцҪЗ¶ИАҙҪйЙЬЖыіөҝШЦЖЖчЈЁECUЈ©№КХПХп¶ППөНіЎЈ
ұҫОДАҙЧФУЪОўРЕ№«ХЛәЕЖыіөөзЧУУлИнјюЈ¬УЙ»рБъ№ыИнјюLindaұајӯЎўНЖјцЎЈ |
|
ФшҫӯҝҙөҪЖыіөТЗұніцПЦ№КХПөЖКұЈ¬ЧЬКЗәЬәГЖжПлЦӘөАХвёцНјұкКЗКІГҙТвЛјЈ¬КІГҙКұәт»біцПЦЈ¬УЦКІГҙКұәт»бПыК§ЎЈЗЎәГХвБҪДкҪУҙҘөҪБЛХвР©ЦӘК¶Ј¬УРЛщБЛҪвЈ¬ФЪҙЛ·ЦПнёшёРРЛИӨөДЕуУСЎЈ
ұҫОДҪ«ҙУПөНіЈ¬ЙијЖәНКөПЦ3ёцҪЗ¶ИАҙҪйЙЬЖыіөҝШЦЖЖчЈЁECUЈ©№КХПХп¶ППөНіЈә
ФЪПөНіҪЗ¶ИЈ¬БЛҪвОӘКІГҙРиТӘ№КХПХп¶ППөНіЈ¬АыУГЛьҝЙТФЧцКІГҙЈ¬ТФј°ЛьКЗКІГҙЈ»
ФЪЙијЖҪЗ¶ИЈ¬БЛҪв№КХПФхГҙ№ЬАнЈ¬ФхГҙК¶ұрЈ¬ФхГҙҙҰАнЈ»
ФЪКөПЦҪЗ¶ИЈ¬БЛҪв»щУЪAUTOSARјЬ№№өД№КХПХп¶ППөНіКөПЦ»ъЦЖЎЈ
1 ECU№КХПХп¶ППөНіҪйЙЬ
ЖыіөЙПИОәОТ»ёцБгјю»тИОәОБгјюјд¶јҝЙДЬ»бІъЙъК§Р§Ј¬јҙК№К§Р§өДёЕВКј«өНЈ¬ө«Г»·ЁұЈЦӨ°Щ·ЦЦ®°ЩІ»»бК§Р§ЎЈ»щУЪХвСщөДКВКөЈ¬ОТГЗГ»°м·ЁЧиЦ№Ј¬ө«КЗҫЎҝЙДЬИҘК¶ұрөҪЗұФЪөДК§Р§Ј¬ХвСщІЕДЬЧоҙуПЮ¶ИИҘұЬГвЙЛәҰЎЈЛщТФЈ¬ЖыіөөДёчёцҝШЦЖЖч¶јРиТӘ№КХПХп¶ППөНіЈ¬ИҘІ»¶ПјмІвПөНіЎўБгјюөИөДТміЈЦ®ҙҰЈ¬ҙУЦРХТіц№КХПЈ¬ХТіц№КХПә󣬻№ПЈНыТ»·ҪГжҝЙТФІЙИЎБЩКұІ№ҫИҙлК©Ј¬Ҫ«ЙЛәҰјхөҪЧоРЎЈ¬БнТ»·ҪГжЈ¬ұЈҙж№КХПРЕПўЈ¬ТФ№©әуРшЕЕІйәНҪвҫц№КХПЎЈТтҙЛЈ¬»щУЪХвСщөДРиЗуЈ¬НкХыөДECU№КХПХп¶ППөНі°ьАЁіөДЪФЪПЯХп¶ППөНіәНіөНвАлПЯХп¶ППөНіБҪёцІҝ·ЦЈ¬Ҫ«БҪХЯЕдәПК№УГЈ¬ҫНҝЙТФҪшРРНкХыөШ№КХПХп¶ПЎЈ
ЖдЦРЈ¬іөДЪФЪПЯХп¶ППөНіУГУЪјаІвіөДЪІҝөДҙ«ёРЖчЈ¬өзЧУҝШЦЖөҘФӘәНЦҙРРЖчөД№ӨЧчЧҙМ¬Ј¬ІўёщҫЭХвР©КэҫЭРЕПўЧФ¶ҜјмІвПөНі№КХПЈ¬ІўҪ«ТФ№КХПВлөДРОКҪұЈҙжЈ¬Н¬КұЧціцПаУҰөД№КХПҙҰАнҙлК©Ј¬ІўөгББПа¶ФУҰөД№КХПөЖМбРСјЭК»ИЛФұЎЈ
іөНвАлПЯХп¶ППөНіУГУЪМбИЎТСұЈҙжөД№КХПРЕПўЈ¬НЁ№эПтіөДЪФЪПЯХп¶ППөНі·ўЛН·юОсЗлЗуЈЁјҙК№УГUDS·юОсЈ©өДРОКҪЈ¬ҝЙҪшРР¶БИЎ№КХПВлРЕПўЎўЗеіэ№КХПВләНЛўРҙИнјюөИІЩЧчЈ¬НкіЙ№КХПөДөчІйУлО¬РЮЎЈ
ТІҫНКЗЛөЈәөұЖыіөіцПЦ№КХПЈ¬іөДЪФЪПЯХп¶ППөНіҫНУҰёГЖрЧчУГЈ¬ЧоЦХМбРСјЭК»ФұУР№КХПЈ¬ДЗјЭК»ФұҪ«Жыіө·өРЮЎЈО¬РЮИЛФұҪшРРІйТтәНО¬РЮЈ¬ҫНРиТӘК№УГіөНвАлПЯХп¶ППөНіЈ¬Ійҝҙ№КХПРЕПўЎўІйХТФӯТтәНёьРВИнјюІЩЧчөИЎЈ
2 ECU№КХПХп¶ППөНіЙијЖөДИфёЙТӘөг
ОӘБЛКөПЦЙПОДөДECU№КХПХп¶ППөНіЈ¬Н¬КұТІОӘЖМөжПВОДөДECU№КХПХп¶ППөНіECU№КХПХп¶ППөНіКөПЦЈ¬РиТӘПИҪйЙЬЙијЖ·ҪГжөДјёёцЦШТӘЦӘК¶өгЈ¬ЦчТӘ°ьАЁЈәХп¶П№КХПВлDTCЈ¬№КХПХп¶П»ъЦЖәНUDS·юОсЎЈ
2.1 Хп¶П№КХПВлDTC
ECU№КХПХп¶ППөНіјмІвөД№КХПЦчТӘУРОеЦЦАаРНЈә
»ъРө/ПөНі№КХПЈ¬ТФұдЛЩПдҝШЦЖЖчЛщЙжј°өД№КХПОӘАэЈ¬ПсөІО»ЦҙРРЖч»өБЛЈ¬АләПЖч»өБЛөИ№КХПЈ»
өзЧУөзЖч№КХПЈ¬ұИИзөзҙЕ·§»тҙ«ёРЖч¶МВ·Ј¬өзФҙөзС№І»ФЪ№ӨЧч·¶О§өИ№КХПЈ»
УІјю№КХПЈ¬ЦчТӘЦёPCBЙПөДЖчјю№КХПЈ¬ұИИзҙҰАнЖч№КХПЈ¬НвО§РҫЖ¬№КХПөИЈ»
Инјю№КХПЈ¬ұИИзЛАСӯ»·Ј¬ іэБгЈ¬ТзіцөИ№КХПЈ»
НЁС¶№КХПЈ¬ ұИИзCANБ¬І»ЙПЈ¬CANұЁОД¶ӘК§өИ№КХПЎЈ
¶ФУЪХвР©№КХПЈ¬»щУЪ№ЬАнәНҙҰАн·ҪГжөДҝјВЗЈ¬ІЙУГХп¶П№КХПВлЈЁDiagnostic Trouble CodeЈ¬DTCЈ©АҙұнКҫЎЈПВГжҫНҫЯМеБЛҪвDTCөДјёёцЦШТӘёЕДоЈә
2.1.1 DTC¶ЁТе
DTCҝЙТФЛөКЗ№КХПАаРНөД"Йн·ЭID"Ј¬Т»ёцDTCУіЙдТ»ёц№КХПАаРНЈЁХп¶ПКВјюЈ©ЎЈDTCёсКҪКЗёщҫЭјёёц№ъјКұкЧјРӯТйАҙ¶ЁТеөДЈ¬ұИИзISO-14229-1Ј¬SAE
J2012 OBD DTCәНSAE J1939-73өИЎЈЧЬөДАҙЛөЈ¬DTC·ЦОӘnon OBDәНOBDБҪЦЦёсКҪЈ¬ИзПВЛщКҫЈә
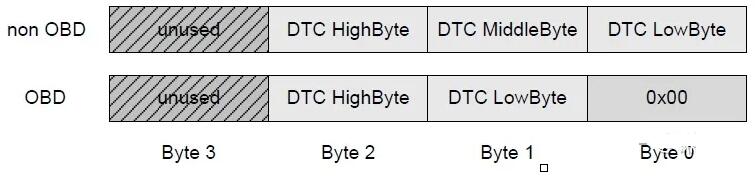
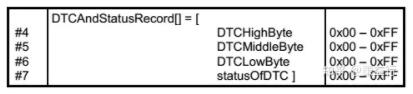
ТФnon OBDОӘАэЈ¬DTC°ьә¬3ёцЧЦҪЪКэҫЭЎЈЖдЦРHighByteәНMiddleByteХв2ёцЧЦҪЪұнКҫ№КХПДЪВлЈ¬¶ФУҰ5О»ұкЧј№КХПВлЈЁөЪТ»О»КЗЧЦДёЈ¬әуЛДО»КЗКэЧЦЈ©ЎЈ
З°БҪО»УГАҙЗш·Ц№КХПАҙЧФөДҝШЦЖПөНі, КЗПөНіҙъВлЈ¬ұИИзB0-B3 КЗУГФЪіөЙнҝШЦЖПөНіЈ¬C0-C3 КЗУГФЪөЧЕМҝШЦЖПөНіЈ¬P0-P3КЗУГФЪ·ў¶Ҝ»ъҝШЦЖПөНіЈ¬U0-U3
КЗУГФЪНЁС¶№КХПЈ»
өЪИэО»КЗКэЧЦЈ¬ұнКҫұнКҫ№КХПЛщКфөДЧУПөНіВлЈ»
ЧоәуБҪО»КэЧЦМṩ№КХПөД¶ФПуәНАаРНЎЈ
ұИИз"P080081"Хвёц№КХПВлЦРЈ¬№КХПДЪВлОӘ"P0800"Ј¬ЖдЦРЎ°P08Ўұҙъұн¶ҜБҰПөНіөДҙ«¶ҜПөНіҝШЦЖ№КХПЈ¬Ў°00Ўұҙъұнҙ«ёРЖчЎЈ
LowByteХвёцЧЦҪЪұнКҫFailure TypeЈ¬°ьә¬Failure categoryәНFailure
Sub TypeБҪёцІҝ·ЦЈ¬ҫЯМеҝЙІОҝјSAE J2012-DAЈ¬ұИИзіЈјыөДtimeoutУҰёГУГ0x87Ј¬РЕәЕОЮР§УҰёГОӘ0x81өИөИЈ»¶ш¶ФУЪOBDПа№ШөДECUөДDTCЧоөНЧЦО»ҫщОӘ0x00ЎЈ
ҪУЧЕ"P080081"Хвёц№КХПВлЈ¬Ў°P08Ўұҙъұн¶ҜБҰПөНіөДҙ«¶ҜПөНіҝШЦЖ№КХПЈ¬Ў°00Ўұҙъұнҙ«ёРЖчЈ¬Ў°81ЎұҙъұнРЕәЕОЮР§Ј¬ЛщТФХвёцDTCҙъұнҫНКЗ¶ҜБҰПөНіөДҙ«¶ҜПөНіҝШЦЖөДҙ«ёРЖчРЕәЕОЮР§ЎЈ
өҪҙЛИПК¶БЛDTCЈ¬іэҙЛЦ®Нв»№РиТӘБЛҪвЛьөДСПЦШіМ¶ИЈ¬ТтОӘІ»Н¬өДСПЦШіМ¶ИҪ«»бУРІ»Н¬өДҙҰАн·ҪКҪЎЈDTCСПЦШіМ¶ИІЙУГ1ёцЧЦҪЪАҙҙжҙўЈ¬Ль·ЦОӘAЎўBЎў
CЎўDЛДёцөИј¶ЎЈұИИзЛөAАаұнКҫБўјҙО¬РЮіөБҫЈ¬BАаұнКҫј°КұО¬РЮіөБҫЈ¬CАаұнКҫУ°ПмІ»ҙуЈ¬УРКұјдФЩО¬»ӨЈ¬DАаұнКҫГ»У°ПмЎЈ
ТэЧФISO14229
2.1.2 DTCёҪКфРЕПў
ёщҫЭЙПКцDTCөД¶ЁТеЈ¬ОТГЗҝЙТФЦӘөАКЗКІГҙ№КХПТФј°№КХПКЗ·сСПЦШЈ¬ө«ХвІ»ДЬЗеОъөГЦӘ№КХПКІГҙКұәт·ўЙъөДЈ¬КІГҙФӯТтөјЦВ·ўЙъөДЈ¬ТтҙЛ»№РиТӘDTCөД№ШјьРЕПўЈ¬ұИИзDTCЧҙМ¬ЈЁDTC
statusЈ©ЎўDTCҝмХХРЕПўЈЁSnapshotЈ©әНDTCА©Х№КэҫЭРЕПў(Extended data)ЎЈЦ»УРҙжҙўПВБЛХвР©№ШјьРЕПўЈ¬ІЕДЬЦъУЪ№КХПөДҪвҫцЎЈ
1> DTC ЧҙМ¬
ПИҝҙDTCЧҙМ¬Ј¬УГ1ёцЧЦҪЪАҙҙжҙўЈ¬Жд8ёцbit·ЦұрҙъұнОӘЈә
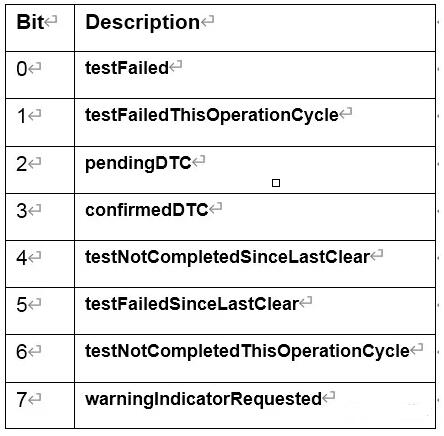
ТэЧФISO14229
іЈМэЛөАъК·№КХПәНөұЗ°№КХПЈ¬¶ФУҰЙПұнЈ¬өұЗ°№КХПОӘbit0ОӘ1өД№КХПЈ¬АъК·№КХПЦёbit0ОӘ0ө«КЗbit3ОӘ1өД№КХПЈ¬DTCStatus
= 0x09 ұнКҫөұЗ°№КХПЈ¬јҙDTCStatus = 0x08 ұнКҫАъК·№КХПЎЈ
АъК·№КХПКЗ№эИҘ·ўЙъө«өұЗ°»№Г»УРЗеіэөД№КХПВлЎЈАъК·№КХПІъЙъөДФӯТтУРБҪЦЦЗйҝцЈ¬Т»ЦЦКЗ№КХПјәҫӯЕЕіэЈ¬Ц»КЗОҙЗеіэ№КХПВлЈ¬ҙЛҙъВлЗеіэә󣬹КХПҫНІ»»бФЩҙО·ўЙъЈ»БнТ»ЦЦКЗ№КХПІўОҙЕЕіэЈ¬Ц»КЗөұЗ°Г»УР·ўЙъЈ¬ҙЛҙъВлЗеіэәуЈ¬өұ№КХПФЩҙО·ўЙъКұЈ¬№КХП»№»біцПЦЎЈ
өұЗ°№КХПКЗХэ·ўЙъөД№КХПІъЙъөД№КХПВлЎЈөұЗ°№КХПКЗИ·КөҙжФЪөД№КХПТэЖрөДЈ¬ЛьКфУЪіЦРшРФ№КХПІъЙъөД№КХПВлЈ¬ЛьІ»»бұ»ЗеіэЎЈ
өұЗ°№КХПКЗөұЗ°И·КөҙжФЪөД№КХПЈ¬ұИҪПИЭТЧЕР¶ПЎЈ¶шАъК·№КХПұИҪПДСУЪЕР¶ПЈ¬ТтОӘЛьКЗФшҫӯ·ўЙъөД№КХП¶шПЦФЪГ»УРЈ¬ЦШПЦ№КХПІъЙъөДЧҙМ¬Ј¬ҝЙДЬРиТӘәЬіӨКұјдАҙІ¶ЧҪАъК·№КХПВлөДЦШПЦЈ¬»тХЯРиТӘИЛОӘөДҙҙФмҝЙЦШПЦ№КХПөДМхјюЈ¬ИзјУИИЎўХс¶ҜөИЈ¬Н¬КұРиТӘҪПәГөДЙиұёАҙІ¶ЧҪ№КХПіцПЦЛІјдёчЦЦКэҫЭІОКэөДұд»ҜІЕРРЎЈТтҙЛЈ¬Т»°гПИҪвҫцөұЗ°№КХПЈ¬¶ш¶ФУЪАъК·№КХПФЭКұЧчОӘ№КХПХп¶ПөДІОҝјЎЈ
ТФЙПҫНКЗНЁіЈөұЗ°№КХПәНАъК·№КХП¶ФDTCЧҙМ¬өДЛөГчЈ¬№ШУЪ8ёцbit¶ФУҰөДҫЯМеЧҙМ¬ҪвОцЈ¬ҝЙІОҝјISO14229
»т
ХЕ¶ЎЈәЖыіөҝШЦЖЖчЈЁECUЈ©ЦРDTCөДЧҙМ¬О»
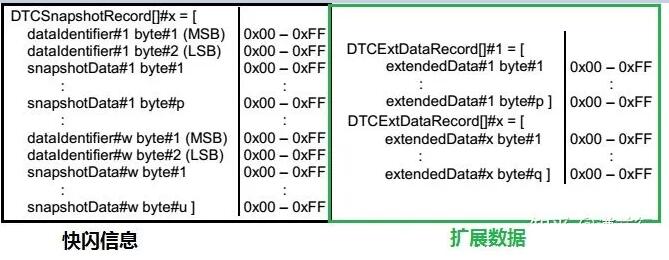
2> ҝмХХРЕПў
ҝмХХРЕПўҫНАаЛЖХХПа»ъТ»СщЈ¬ФЪ№КХП·ўЙъөДКұҝМЈ¬¶ФХыіөРЕПў°ҙПВҝмГЕЈ¬ЧцёцјЗВјЈ¬ТФұгәуРш·ЦОцОКМвЎЈҝмХХРЕПўТ»°г°ьАЁ№©өзөзС№ЎўАпіМ¶БКэЎўөг»рЧҙМ¬Ўў·ў¶Ҝ»ъАдИҙТәОВ¶ИЈ¬ҪЪЖшГЕО»ЦГЈ¬·ў¶Ҝ»ъЧӘЛЩЈ¬іөЛЩөИРЕПўЈ¬ИзПВЛщКҫЎЈХвР©»б°ҙ№ж¶ЁөД·ҪКҪұЈҙжПВАҙЎЈ
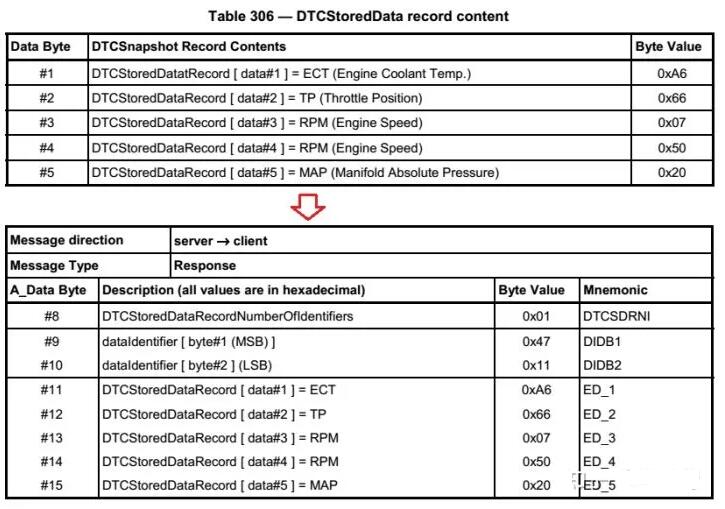
ТэЧФISO14229
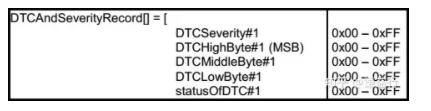
3> А©Х№КэҫЭ
А©Х№КэҫЭРЕПўКЗТ»ЧйМṩDTCПа№ША©Х№ЧҙМ¬РЕПўөДКэҫЭЧйЈ¬°ьАЁ№КХПіцПЦјЖКэЖчЎў№КХПҙэ¶ЁјЖКэЖчЎўТСАПИҘјЖКэЖчәНАП»ҜјЖКэЖчөИЈ¬ХвР©РЕПўөДҫЯМеДЪИЭТ»°г¶јУЙҝН»§Аҙ¶ЁТеЎЈИзПВКҫТвЈә
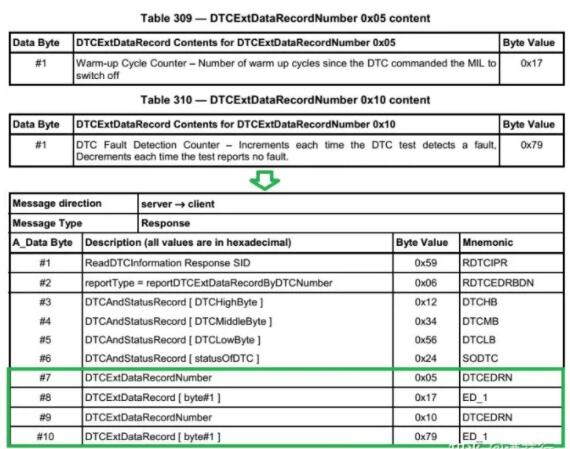
ТэЧФISO14229
ТФЙПҫНКЗDTCПа№ШөДјёёцЦШТӘёЕДоЈ¬ХвСщҫНҝЙТФЦӘөА№КХПКЗКІГҙЈ¬ТІҝЙТФөГөҪёГ№КХПөДёҪјюРЕПўЎЈ
DTCөДХвР©ДЪИЭЙијЖТӘГҙКЗёщҫЭұкЧјРӯТйЈ¬ТӘГҙКЗёщҫЭҝН»§өДМШ¶ЁРиЗуЈ¬І»№ЬКЗДДЦЦРОКҪЈ¬Т»°г¶јКЗТФРиЗуРОКҪТӘЗуКөПЦ·ҪКөПЦЎЈөұИ»Ј¬іэБЛХвР©ДЪИЭ»бЧчОӘРиЗуөДТ»Іҝ·ЦЈ¬ҪУПВАҙТӘҪйЙЬөД№КХПХп¶П»ъЦЖДЪИЭТІ»бЧчОӘРиЗуөДБнТ»Іҝ·ЦЎЈ
2.2 ECU№КХПХп¶П»ъЦЖ
№КХПХп¶П°ьАЁјмІвЈ¬И·ИПәНҙҰАн3ёцІҝ·ЦЎЈ
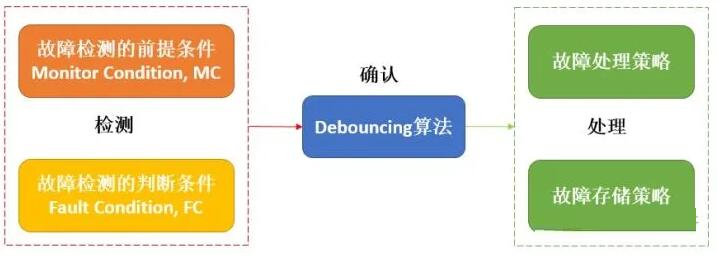
2.2.1 №КХПөДјмІв
№КХПөДјмІвКЗУЙіөДЪФЪПЯХп¶ППөНіАҙЦҙРРЈ¬ПИНЁ№эECUДЪІҝИнУІјю№ҰДЬДЈҝйКөПЦЧФОТХп¶ПЈ¬¶Ф№КХПөДјмІв·ЦБҪІҪЈәПИҝҙјмІв№КХПөДЗ°МбМхјюЈ¬јҙКІГҙКұәт»тЗйҝцРиТӘИҘјмІвДіТ»ЦЦ№КХПЎЈұИИзөзҙЕ·§№ШұХКұЈ¬ИфјмІвөзҙЕ·§УРОЮ¶ВИы№КХПЈ¬КЗІ»әПАнТІІ»РиТӘөДЈ¬ө«өзҙЕ·§ТСҝӘЖфЈ¬ФтјмІвУРұШТӘЎЈФЩҝҙјмІв№КХПөДЕР¶ПМхјюЈ¬јҙНЁ№эФхСщөДВЯјӯИҘК¶ұрДіТ»ЦЦ№КХПЎЈұИИзөзҙЕ·§ТСҙтҝӘЈ¬ө«јаІвНЁ№эөзҙЕ·§өДБчБҝ·ЗіЈРЎЈ¬ДЗГҙ»іТЙКЗөзҙЕ·§¶ВИы№КХПЎЈ
2.2.2 №КХПөДИ·ИП
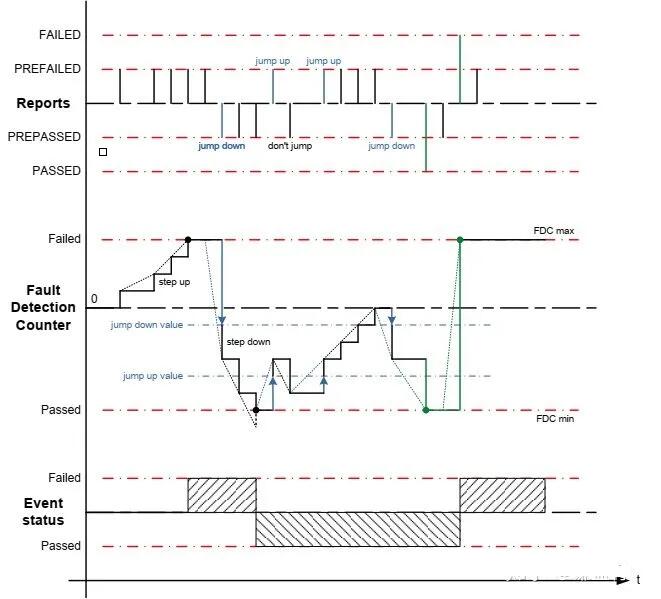
№КХПөДИ·ИПКЗЦёЙПКцјмІвөҪЎ°№КХПЎұіцПЦ¶аЙЩҙО»т¶аіӨКұјдІЕЛгКЗХжХэөД№КХПЎЈТтОӘУРКұҝЙДЬЦ»КЗДіёцРЕәЕј«ЖдЕј¶ыІЁ¶ҜТ»ПВЈ¬¶шХвЦЦІЁ¶Ҝ¶ФЖыіөГ»УРУ°ПмЈ¬ХвКұИз№ыК¶ұрОӘ№КХПЈ¬ДЗГҙҫН№эГфёРБЛЈ¬·ҙ¶ш»бёшјЭК»ФұҙшАҙА§ИЕЎЈТтҙЛЈ¬ОӘБЛ№жұЬХвСщөДЗйҝцТІұ»К¶ұрОӘ№КХПЈ¬ДЗГҙҫНМбіцБЛdebouncingөДёЕДоЈ¬јҙНЁ№эТ»ҙОҙОКэ»тКұјдөДАЫјУЈ¬ІЕДЬИ·ИПКЗ·сіцПЦБЛХжХэөД№КХПЎЈЦ»УРөұЎ°№КХПЎұіцПЦҙОКэ»тКұјдАЫјУөҪТ»¶ЁөДЦөЈ¬ІЕИ·ИП№КХПЎЈөұЗ°іЈУГDebouncingЛг·ЁУР»щУЪјЖКэЖчәН»щУЪКұјдБҪАаЈ¬ИзПВЛщКҫЈә
»щУЪјЖКэЖчөДDebouncingЛг·ЁЈ¬ТэЧФ[1] 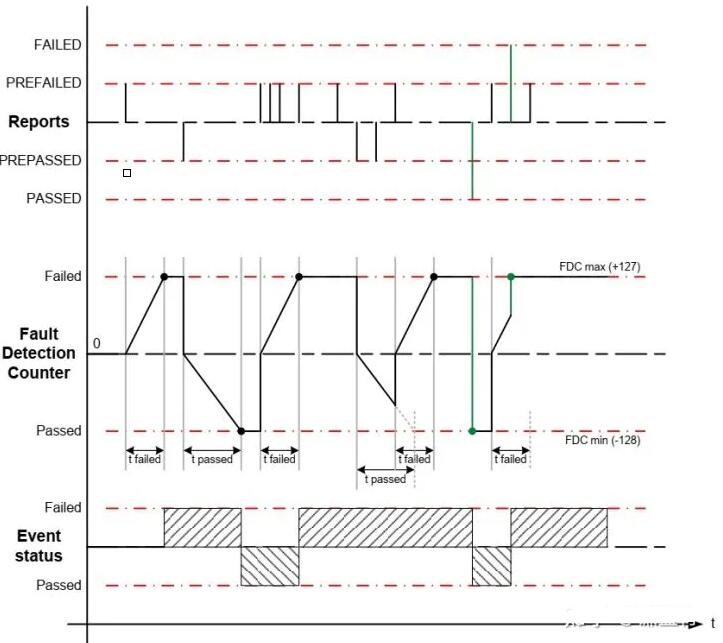
»щУЪКұјдөДDebouncingЛг·Ё,ТэЧФ[1]
ЧЬөДАҙЛөЈ¬DebouncingЛг·ЁФӯАнКЗЈәёщҫЭјмІвөҪЎ°№КХПЎұЧҙМ¬ЈЁPREFAILED, FAILED,
PREPASSED, PASSEDЈ©АҙФцјхјЖКэЖч»т¶ЁКұЖчЈ¬Ц»УРҙОКэ»тКұјдҙпөҪгРЦөЈ¬ІЕДЬИ·ИП»тПыіэ№КХПЎЈИзЙПНјЛщКҫЈ¬өұұЁёжөДЧҙМ¬КЗPREFAILEDКұЈ¬јЖКэЖч»т¶ЁКұЖчҫНАЫјУТ»ҙОЈ»өұАЫјУҙОКэ»тКұјдөҪFailedөДУтЦөЈ¬ДЗГҙЎ°№КХПЎұҫНұ»И·ИПЎЈХвАп»бЙжј°өДТ»Р©ІОКэРиТӘ¶ЁТеЗеіюЈ¬ТтҙЛОӘХвР©ІОКэҪ«»бҫц¶Ё№КХПРиТӘ¶аіӨКұјдИ·ИП»т»ЦёҙЈ¬ПсНјЦРЛщКҫөДІҪіӨәНгРЦөөИЎЈұИИз¶ФУЪДіёц№КХПөДИ·ИПКұјдОӘ200msЈ¬јЖКэЖчГҝ5msјЖКэТ»ҙОЈ¬јЩЙиЙи¶ЁгРЦөОӘ40Ј¬ұЁёжЧҙМ¬ЗР»»КұЈ¬јЖКэЖчЧЬКЗҙУ0ҝӘКјјЖКэЈ¬ДЗГҙХвКұХл¶Ф№КХПИ·ИПөД№М¶ЁІҪіӨЙиЦГОӘ1ЎЈЧЬЦ®Ј¬І»Н¬DebouncingЛг·ЁөДПёҪЪҙҰАн»бІ»Н¬Ј¬ҝЙёщҫЭКөјКХп¶ПРиЗуСЎФсККәПөДDebouncingЛг·ЁЎЈ
2.2.3 №КХПөДҙҰАн
өұ№КХПұ»И·ИПЈ¬ДЗГҙіөДЪФЪПЯХп¶ППөНіТ»·ҪГжҪ«№КХПВлDTCј°Па№ШКэҫЭҙжИлECUДЪІҝөД·ЗТЧК§ҙжҙўЖчДЪЈ»БнТ»·ҪГжҪ«¶Ф№КХПҪшРРҙҰАнЈ¬ЦчТӘ°ьАЁөгөЖІЯВФәН№КХПҙҰАнІЯВФЎЈЖдЦРЈ¬өгөЖІЯВФКЗЦёёщҫЭ№КХПөДСПЦШіМ¶Иҫц¶ЁКЗ·сөгББ№КХПЦёКҫөЖТФј°өгББәОЦЦСХЙ«Ј¬ТФҙЛҫҜКҫјЭК»Фұ№КХПөДҙжФЪЈ¬¶ш№КХПҙҰАнІЯВФКЗЦёёщҫЭ№КХПөДСПЦШіМ¶Иҫц¶ЁЧцФхСщөДБЩКұҙҰАнҙлК©ЎЈұИИзіцПЦБЛұдЛЩПдёЯөөО»Лр»ө№КХПЈ¬ДЗГҙХвКұөг»ЖөЖЈ¬ПФКҫұдЛЩПд№КХПЈ¬Н¬КұПЮЦЖЖыіөРРК»ЛЩ¶ИЈ¬ІЙУГхЛРР»ШјТДЈКҪЈ»»тХЯіцПЦБЛіөҙ°ОЮ·ЁПВҪө№КХПЈ¬ДЗГҙХвКұІ»өгөЖЈ¬ҙЛКұТІІ»»б¶ФЖыіөРРК»УРИОәОПЮЦЖЎЈ

іөБҫРРК»№эіМЦРЈ¬НЁ№эЙПКц»ъЦЖҫНҝЙТФУЙіөДЪХп¶ПХп¶ППөНіКөКұјаҝШECUёчІҝ·ЦөД№ӨЧчЧҙМ¬Ј¬ҙУ¶шјмІвіц№КХПЎЈ
2.3 НіТ»Хп¶П·юОсUDS
ЙПКцөД№КХПВлDTCј°Па№ШКэҫЭҙжИлECUДЪІҝөД·ЗТЧК§ҙжҙўЖчәуЈ¬ТӘФхГҙ»сИЎДШЈҝХвҫНЙжј°өҪіөНвАлПЯХп¶ППөНіЈ¬РиТӘК№УГөҪНіТ»Хп¶П·юОсЈЁUnified
Diagnostic ServicesЈ¬UDSЈ©Ј¬өұИ»Йжј°ЕЕ·Е»бК№УГөҪOBD·юОсЈ¬ХвАпҪцҪйЙЬUDS·юОсЎЈUDS·юОсКЗХп¶П·юОсөД№ж·¶»ҜұкЧјЈ¬№ж¶ЁБЛ¶БИЎDTCөДЦёБоЈ¬¶БХп¶ПКэҫЭБчөДЦёБоөИЎЈ
ПИҝҙТ»ёцК№УГUDS·юОсөДАэЧУЈәјЩИзіөҙ°ПөНііцПЦ№КХПЈ¬ФтО¬РЮИЛФұРиТӘПИК№УГUDS¶БРҙ·юОсИҘ»сИЎИнЎўУІјю°жұҫәЕЈ¬№©өзөзС№өИЈ¬ТФ»сИЎТ»Р©Чо»щұҫөДРЕПўЈ»ФЩК№УГUDS·юОсІйҝҙDTCПа№ШРЕПўЈ¬БЛҪвҫЯМеіцПЦБЛКІГҙ№КХПЈ¬ұИИзіцПЦөз»ъ№КХПЈ¬ДЗҝЙТФК№УГUDSАэіМҝШЦЖ·юОсИҘҝШЦЖҝӘЖфөз»ъЎЈөұ·ўПЦХвёц№КХПФЪҫЙ°жұҫөДИнјю¶јҙжФЪЈ¬РВ°жұҫөДИнјюТСҫӯРЮёҙБЛХвР©№КХПЈ¬ДЗГҙК№УГUDSЛўРҙ·юОсёьРВИнјюЎЈөұИ»Хвёц№эіМЛщК№УГөДХвР©UDS·юОс¶јКЗНЁ№эХп¶ПЙиұё·ўЛНөДЈ¬ЛщК№УГөҪөД·юОсИзПВКҫТвЎЈ
ЧЬөДАҙЛөЈ¬°ҙ№ҰДЬ»®·ЦЈ¬UDS·юОсҝЙ·ЦОӘ6АаЈ¬№І26ЦЦ·юОсЈ¬·ЦұрКЗЈә
1Ј©Хп¶ПәННЁРЕ№ЬАн№ҰДЬөҘФӘЈ¬°ьАЁ10Ј¬11Ј¬27Ј¬28Ј¬3EЈ¬83Ј¬84Ј¬85Ј¬86Ј¬87№І10ЦЦ·юОсЈ»
2Ј©КэҫЭҙ«Кд№ҰДЬөҘФӘЈ¬°ьАЁ22Ј¬23Ј¬24Ј¬2AЈ¬2CЈ¬2EЈ¬3D№І7ЦЦ·юОсЈ»
3Ј©ҙжҙўКэҫЭҙ«Кд№ҰДЬөҘФӘЈ¬°ьАЁ14Ј¬19№І2ЦЦ·юОсЈ»
4Ј©КдИлКдіцҝШЦЖ№ҰДЬөҘФӘЈ¬°ьАЁ2F·юОсЈ»
5Ј©АэРРіМРт№ҰДЬөҘФӘЈ¬°ьАЁ31·юОсЈ»
6Ј©ЙПҙ«ПВФШҝШЦЖ№ҰДЬөҘФӘЈ¬°ьАЁ34Ј¬35Ј¬36Ј¬37Ј¬38№І5ЦЦ·юОсЎЈ
ХвР©UDS·юОсөДІгҙО№ШПөКЗЈәКЧПИКЗИ·¶ЁФЪКІГҙХп¶П»б»°ДЈКҪЈЁ$10Ј©Ј¬јҙКЗД¬ИП»б»°Ј¬»№КЗА©Х№»б»°Ј¬»№КЗұаіМ»б»°Ј»ФЪҙЛ»щҙЎЙПЈ¬ФЩГчИ·КЗ·сРиТӘК№УГ°ІИ«·ГОК·юОсЈЁ$27Ј©ҪвЛшЈ¬УРР©№ҰДЬ·юОсРиТӘНЁ№эёГ·юОсҪвЛшІЕДЬК№УГЈ¬УРР©ФтІ»РиТӘҝјВЗёГ·юОсЈ»ЧоәуІЕДЬКөПЦҫЯМеөД·юОсҝШЦЖЎЈ
№ШУЪUDS·юОсөДҫЯМеҪйЙЬЈ¬ҝЙІОҝјОТөДЧЁАёЈәЖыіөECUИнјюҝӘ·ўөДUDSРӯТйПкҪвПөБРЈЁөг»чҪшИлЈ©ЎЈ
2.4 РЎҪб
»Ш№ЛЙПКцұҫҪЪДЪИЭөДҪйЙЬҝЙЦӘЈ¬іөДЪФЪПЯХп¶ППөНіёәФр№КХПөДјмІвЈ¬И·ИПәНҙҰАнЈ¬ТФј°ҙжҙў№КХПРЕПўөҪECUөД·ЗТЧК§РФҙжҙўЖчЎЈіөНвАлПЯХп¶ППөНіФтНЁ№эUDS·юОсІйСҜDTCј°ЖдПа№ШРЕПўЈ¬Пыіэ№КХПәНёьРВИнјюЎЈ
3 »щУЪAUTOSARөДECU№КХПХп¶ППөНі
ОӘБЛҪшТ»ІҪБЛҪвECU№КХПХп¶ППөНіЈ¬ҝЙФЪИнјюІгГжҪшТ»ІҪБЛҪвЖдИзәОКөПЦЎЈ¶ФУЪAUTOSARИнјюјЬ№№Ј¬№КХПХп¶ПјИ»бФЪөЧІгИнјюBSWКөК©Ј¬ТІ»бФЪУҰУГІгИнјюASWКөК©Ј¬ҫЯМеҝҙИзәО¶ЁТеБҪХЯөДұЯҪзЎЈ
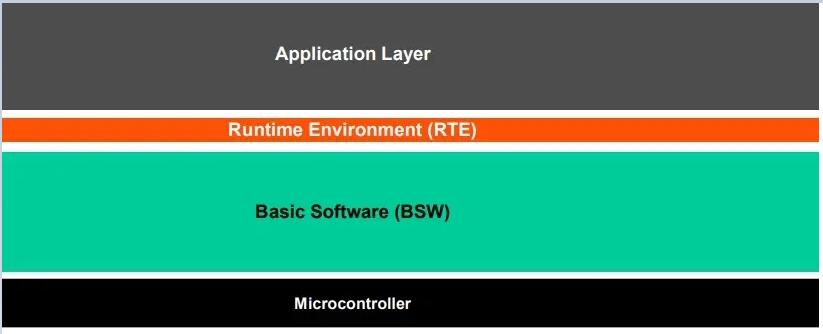
»щУЪAUTOSARөДИнјюјЬ№№
3.1 »щУЪAUTOSARјЬ№№өД№КХПХп¶ППөНіҪйЙЬ
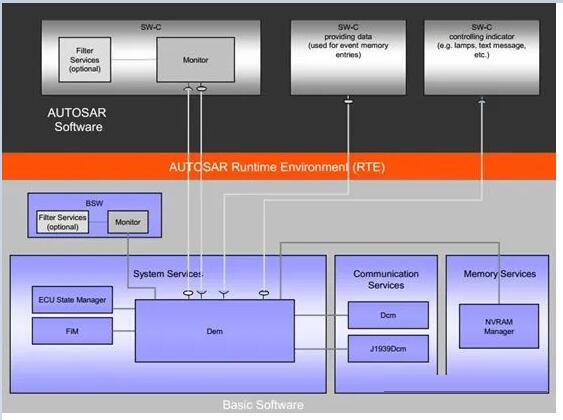
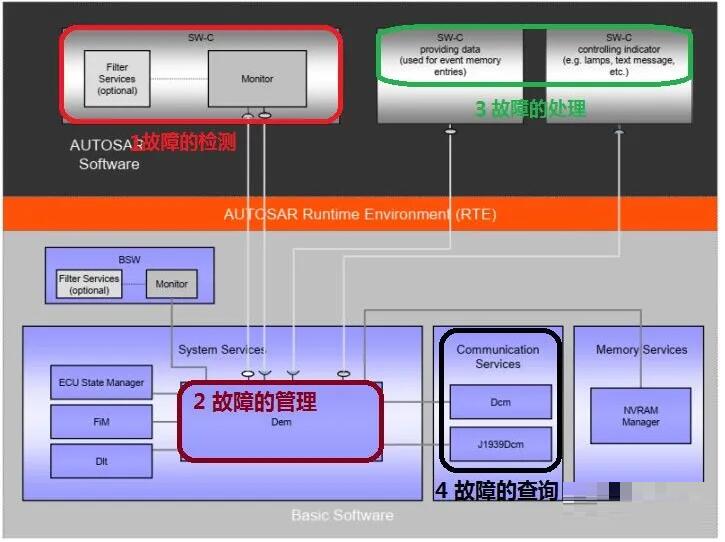
ПВГжАҙБЛҪвПВ»щУЪAUTOSARјЬ№№өД№КХПХп¶ППөНіЈ¬ИзПВЛщКҫЈә
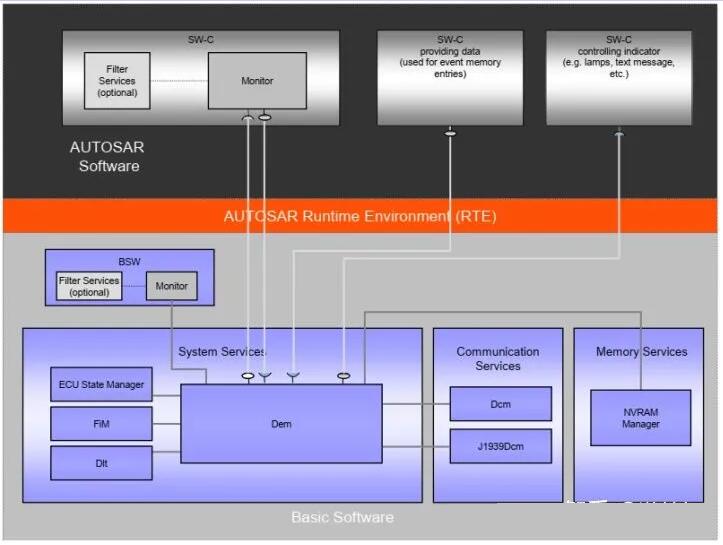
»щУЪAUTOSARјЬ№№өД№КХПХп¶ППөНіЈ¬Ј¬ТэЧФ[1]
Хп¶ПКВјю№ЬАнДЈҝйDemёәФр¶Ф№КХПХп¶ПЎўҙҰАнЎўұЈҙжәН№ЬАнЎЈұИИзDemНЁ№эNvMМṩөДҪУҝЪ·ГОК·ЗТЧК§ҙжҙўЖчЈ¬¶БИЎәНұЈҙж№КХПРЕПўЎЈН¬КұDemПтDcmМṩ·ГОК№КХПКэҫЭөДҪУҝЪЈ¬Из¶Б№КХПВлЈ¬Зеію№КХПВлөИІЩЧчЎЈ
УҰУГІгSW-CјаҝШәҜКэMonitorёәФр№КХПөДјмІвЈ¬ТІҝЙДЬ°ьАЁИ·ИПЈ¬SW-CНЁ№эҪУҝЪәҜКэDem_SetEventStatusҪ«Хп¶ПҪб№ыұЁёжёшDemЎЈИз№ыјаҝШәҜКэMonitor°ьә¬DebouncingЛг·ЁЈ¬јҙУҰУГІгДЬИ·ИП№КХПЈ¬ДЗГҙSW-CёшDemұЁёжХп¶ПҪб№ыКЗDEM_EVENT_STATUS_PASSED»тDEM_EVENT_STATUS_FALIEDЈ¬јҙDemҪУКХИ·ИП№КХПЎЈ·сФтSW-Cҙ«өЭёшDemөДХп¶ПҪб№ыОӘDEM_EVENT_STATUS_PREPASSED»тDEM_EVENT_STATUS_PREFALIEDЈ¬јҙРиТӘФЪөЧІгИнјюИ·ИП№КХПЎЈ
өЧІгSW-CјаҝШәҜКэMonitorёәФрХп¶ППсNvM¶БРҙК§°ЬЈ¬»тЕЕ¶УИООсКэТзіцЈ¬»тРЈСйҙнОуөИАаРН№КХПЈ¬ёГАа№КХПНЁіЈІ»РиТӘК№УГDebouncingЛг·ЁҪшРРИ·ИПЈ¬№КХПЧҙМ¬Ц»УР2ЦЦЈ¬јҙDEM_EVENT_STATUS_FAILED»тDEM_EVENT_STATUS_PASSEDЈ¬SW-CТІКЗНЁ№эҪУҝЪәҜКэDem_ReportErrorStatusҪ«Хп¶ПҪб№ыұЁёжёшDemЎЈ
Хп¶ПНЁС¶№ЬАнДЈҝйDcmёәФрUDS»тOBD·юОсЗлЗуУл·ўЛН№ЬАнЈ¬јҙКХөҪAUTOSARЦ§іЦөДUDS»тOBD·юОсЗлЗуКұЈ¬НЁ№эөчУГDemЈ¬УҰУГІгИнјюЧйјю»тЖдЛы»щҙЎИнјюДЈҝйМṩөДҪУҝЪЈ¬ҪшРРПаУҰөДІЩЧчЎЈ
NvMКЗЦё·ЗТЧК§РФҙжҙў№ЬАнДЈҝйЈ¬№ЬАн·ЗТЧК§РФКэҫЭөДҙжҙўәНО¬»ӨЎЈөұDemИ·ИПөҪ№КХПЈ¬DemөчУГNvMөДРҙәҜКэЈ¬°С№КХПРЕПўәН·ўЙъ№КХПКұөД»·ҫіКэҫЭРҙИлөҪNvMЎЈөұDemТӘІйСҜ№КХПРЕПўЈ¬DemөчУГNvMөД¶БәҜКэЈ¬ҙУNvMЦРЈ¬¶БИЎ№КХПРЕПўәН·ўЙъ№КХПКұөД»·ҫіКэҫЭЎЈ
EcuMДЈҝйёәФрөчУГПа№ШәҜКэ¶ФDemіхКј»ҜЈ¬°ьАЁіхКј»ҜГҝёц№КХПөДdebounceЧҙМ¬Ј¬DemҙжҙўөД№КХПКэҫЭЎЈ
FiMДЈҝйКЗОӘSW-CМṩһёцҝШЦЖ»ъЦЖЈ¬јҙК№ДЬ»тТЦЦЖSW-C№ҰДЬЎЈұИИзөұ№КХПИ·ИПәуЈ¬ҝЙТФНЁ№эFiMТЦЦЖТ»Р©УлҙЛ№КХППа№ШөДSW-C№ҰДЬЈ¬ПсТЦЦЖБЛјмІвЛЩ¶ИөДSW-C№ҰДЬЈ¬ДЗҫНТвО¶ЧЕ»щУЪЛЩ¶ИАҙјмІв№КХПөДЗ°МбМхјюҫНОЮ·ЁВъТвЈ¬ПаУҰөШҙЛАа№КХП¶јҪ«ОЮ·ЁХп¶ПЎЈ
SW-CіэБЛјаҝШәҜКэЈ¬»№УРХл¶Ф№КХП·ўЙъәуөДБЩКұ№КХПҙҰАнәҜКэЈ¬ұИИзТФұдЛЩПдҝШЦЖЖчАҙЛөЈ¬јмІвөҪДіёцөөО»ОЮ·ЁК№УГЈ¬ҝЙДЬҫц¶ЁІЙУГхЛРР»ШјТЈ¬»тХЯҙтҝӘАләПЖчЦР¶П¶ҜБҰөИҙҰАн·ҪКҪЈ»ТІУР№КХПЦёКҫөЖөДҝШЦЖәҜКэЈ¬Т»·ҪГж№КХПіцПЦКұөгББ№КХПЦёКҫөЖөДҝШЦЖЈ¬БнТ»·ҪГжКЗ№КХПұ»О¬РЮҙҰАн»тТт№КХПЧФУъ¶шҪшРРПыИҘ№КХПЦёКҫөЖөДҝШЦЖЎЈ
3.2 »щУЪAUTOSARјЬ№№өД№КХПХп¶ППөНіФЛРРВЯјӯКөАэ
јЩЙиУРХвСщТ»ёц°ёАэЈәјЭК»ФұФЪРРК»№эіМЦРҝҙөҪТЗұніцПЦБЛ·ў¶Ҝ»ъ·ҪГжөД№КХПЈ¬И»әуөјЦВіөБҫ¶ҜБҰЦР¶ПЈ¬Ҫш¶шІ»ДЬјМРшРРК»ЎЈҫӯІйёГ№КХПОӘҝШЦЖҪЪЖшГЕөДөзҙЕ·§¶МВ·өҪөШЈ¬өјЦВёГөзҙЕ·§ОЮ·ЁҝӘЖфЈ¬¶шХвёцөзҙЕ·§ІЙУГёЯұЯЗэ¶ҜөДҝШЦЖ·ҪКҪЈ¬ёЯұЯЗэ¶ҜУР·ҙАЎөзБчөҪҝШЦЖЖчЈ¬ҝӘЖф№ӨЧчКұ»б·ҙАЎёЯөзЖҪЈ¬¶МВ·өҪөШФт»б·ҙАЎөНөзЖҪЎЈ
ХвАп¶ФУЪёГ№КХПөДјмІв¶ЁТеФЪASWөДSW-CДЈҝйЈ¬ИзПВНјЛщКҫЎЈТІҫНКЗЛөЈ¬ФЪХвАпөДMonitorДЈҝйҪ«ПИУРәҜКэИҘЕР¶ПКЗ·сРиТӘјмІвҪЪЖшГЕөДөзҙЕ·§№КХПЈ¬ұИИз·ў¶Ҝ»ъПЁ»рөДКұәтҝЙДЬҫНІ»РиТӘјмІвЈ¬¶ш·ў¶Ҝ»ъЖф¶ҜФтРиТӘЈ»өұРиТӘјмІвКұЈ¬ҫНУРәҜКэИҘЕР¶ПКЗ·сіцПЦҪЪЖшГЕөДөзҙЕ·§№КХПЈ¬¶ФУЪ¶МВ·өҪөШ№КХПЈ¬ҫН»бНЁ№эМхјюЦ®Т»өД·ҙАЎөзБчАҙЕР¶ПЈ¬Из№ы·ҙАЎөзБчОӘёЯөзЖҪЈ¬ФтІ»»бјмІвөҪ¶МВ·өҪөШЈ¬·сФтЈ¬ҫНУРҝЙДЬЎЈөұУРҝЙДЬө«»№І»ЧгТФИ·ИПКұЈ¬ДЗГҙҝЙТФІЙУГdebouncingЛг·ЁЈ¬НЁ№э»щУЪјЖКэ»тјЖКұөД·Ҫ·ЁАҙИ·ИПЎЈ
Т»ө©№КХПИ·ИПЈ¬MonitorөчУГҪУҝЪәҜКэDem_ReportErrorStatusПтDemұЁёжDEM_EVENT_STATUS_FAILEDЎЈҪУЧЕDemДЈҝйҫН»бУлПа№Ш№ҰДЬДЈҝйҪ»»ҘЈ¬ПсЙПОДМбөҪҙжҙў№КХПКэҫЭРЕПўЈ¬ҙ«өЭ№КХПРЕПўёшASW№КХПҙҰАнSW-CДЈҝйөИІЩЧчЎЈ
¶ФУЪҝШЦЖҪЪЖшГЕөДөзҙЕ·§¶МВ·өҪөШЈ¬өзҙЕ·§ОЮ·ЁҝӘЖфЈ¬ХвТвО¶ЧЕ№©УНЦР¶ПЈ¬ДЗГҙТ»·ҪГжSW-CДЈҝйөДПа№ШәҜКэҪ«ёшіц·ў¶Ҝ»ъПЁ»рГьБоЈ¬Н¬КұНЁЦӘЖдЛыҝШЦЖЖчЦР¶П¶ҜБҰЈ¬ұИИзЗлЗуұдЛЩПдҙтҝӘАләПЈ¬№ТҝХөІІЩЧчөИҙҰАнҙлК©Ј»БнТ»·ҪГжSW-CДЈҝйөДПа№ШәҜКэ·ўіцөгББ·ў¶Ҝ»ъ№КХПөЖГьБоЈ¬ТӘЗуҝҝұЯНЈіөМбРСЎЈ
өұ№КХПіөБҫөҪО¬РЮіөјдЈ¬О¬РЮИЛФұҪ«К№УГІвКФТЗЖчЈ¬ІйСҜ№КХПРЕПўЎЈұИИзЈ¬К№УГ19·юОс»сИЎөзҙЕ·§¶МВ·өГөҪХвёцDTCПа№ШРЕПўЈ¬ХвКұDcmДЈҝйөД19·юОсУіЙдөДәҜКэҪ«өчУГDemМṩөДҪУҝЪәҜКэЈ¬НЁ№эХвР©әҜКэ»сИЎDTCПа№ШРЕПўЎЈАаЛЖөДВЯјӯЈ¬ҝЙТФНЁ№э14·юОсЗеію№КХПЎЈ
ТФЙПҫНКЗТ»ёц·ЗіЈ·ЗіЈјт»ҜөД»щУЪAUTOSARИнјюјЬ№№өД№КХПХп¶ПВЯјӯЈ¬ИфПлёьЙоИлөШҙУҙъВләҜКэІгГжБЛҪвЈ¬ҝЙҪшТ»ІҪІОҝјAUTOSAR№Щ·ҪМṩөДПа№ШОДөөЎЈ
|








