无人驾驶:多种技术的集成
无人驾驶技术是多个技术的集成,如图1所示,一个无人驾驶系统包含了多个传感器,包括长距雷达、激光雷达、短距雷达、摄像头、超声波、GPS、陀螺仪等。每个传感器在运行时都不断产生数据,而且系统对每个传感器产生的数据都有很强的实时处理要求。比如摄像头需要达到60FPS的帧率,意味着留给每帧的处理时间只有16毫秒。但当数据量增大之后,分配系统资源便成了一个难题。例如,当大量的激光雷达点云数据进入系统,占满CPU资源,就很可能使得摄像头的数据无法及时处理,导致无人驾驶系统错过交通灯的识别,造成严重后果。
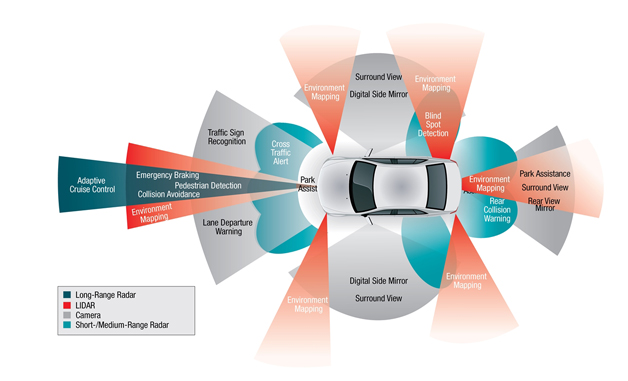
图1 无人驾驶系统范例
如图2所示,无人驾驶系统整合了多个软件模块(包括路径规划、避障、导航、交通信号监测等)和多个硬件模块(包括计算、控制、传感器模块等),如何有效调配软硬件资源也是一个挑战。具体包括三个问题:第一,当软硬件模块数据增加,运行期间难免有些模块会出现异常退出的问题,甚至导致系统崩溃,此时如何为提供系统自修复能力?第二,由于模块之间有很强的联系,如何管理模块间的有效通信(关键模块间的通信,信息不可丢失,不可有过大的延时)?第三,每个功能模块间如何进行资源隔离?如何分配计算与内存资源?当资源不足时如何确认更高的优先级执行?
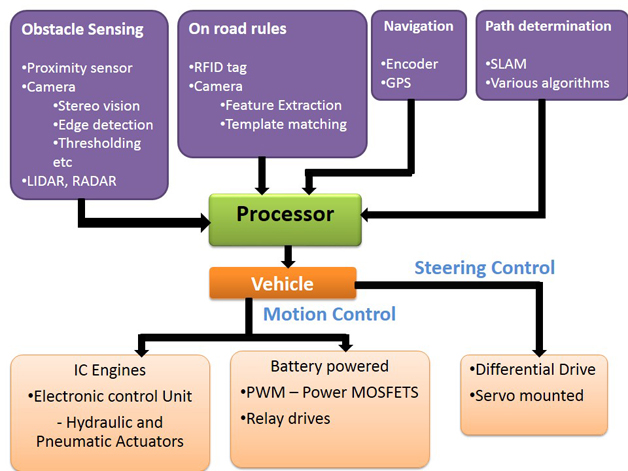
图2 无人驾驶软硬件整合
简单的嵌入式系统并不能满足无人驾驶系统的上述需求,我们需要一个成熟、稳定、高性能的操作系统去管理各个模块。在详细调研后,我们觉得机器人操作系统ROS比较适合无人驾驶场景。下文将介绍ROS的优缺点,以及如何改进ROS使之更适用于无人驾驶系统。
机器人操作系统(ROS)简介
ROS是一个强大而灵活的机器人编程框架,从软件构架的角度说,它是一种基于消息传递通信的分布式多进程框架。ROS很早就被机器人行业使用,很多知名的机器人开源库,比如基于quaternion的坐标转换、3D点云处理驱动、定位算法SLAM等都是开源贡献者基于ROS开发的。因为ROS本身是基于消息机制的,开发者可以根据功能把软件拆分成为各个模块,每个模块只是负责读取和分发消息,模块间通过消息关联。如图3所示,最左边的节点可能会负责从硬件驱动读取数据(比如Kinect),读出的数据会以消息的方式打包,ROS底层会识别这个消息的使用者,然后把消息数据分发给他们。
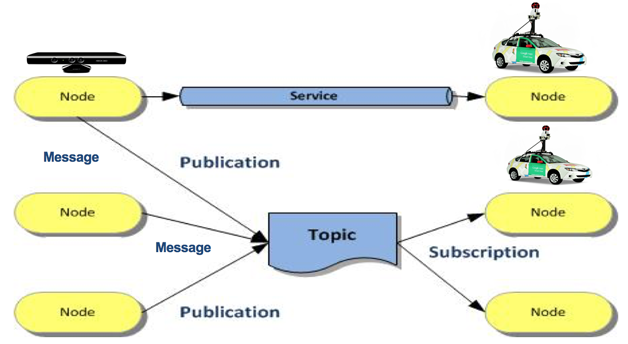
图3 ROS系统
ROS 1.0
ROS 1.0起源于Willow Garage的PR2项目,主要组件包括ROS Master、ROS Node和ROS Service三种。ROS Master的主要功能是命名服务,它存储了启动时需要的运行时参数,消息发布上游节点和接收下游节点的连接名和连接方式,和已有ROS服务的连接名。ROS Node节点是真正的执行模块,对收到的消息进行处理,并且发布新的消息给下游节点。ROS Service是一种特殊的ROS节点,它相当于一个服务节点,接受请求并返回请求的结果。图4展示了ROS通信的流程顺序,首先节点会向master advertise或者subscribe感兴趣的topic。当创建连接时,下游节点会向上游节点TCP Server发布连接请求,等连接创建后,上游节点的消息就会通过连接送至下游节点。
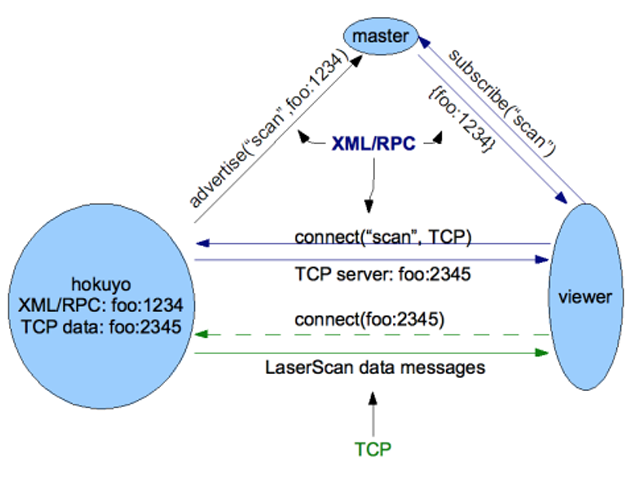
图4 ROS Master Node通信
ROS 2.0
ROS 2.0的改进主要是为了让ROS能够符合工业级的运行标准,采用了DDS(数据分发服务)这个工业级别的中间件来负责可靠通信,通信节点动态发现,并用shared memory方式使得通信效率更高。通过使用DDS,所有节点的通信拓扑结构都依赖于动态P2P的自发现模式,所以也就去掉ROS Master这个中心节点。如图5所示,RTI Context、PrismTech OpenSplice和Twin Oaks都是DDS的中间件提供商,上层通过DDS API封装,这样DDS的实现对于ROS Client透明。
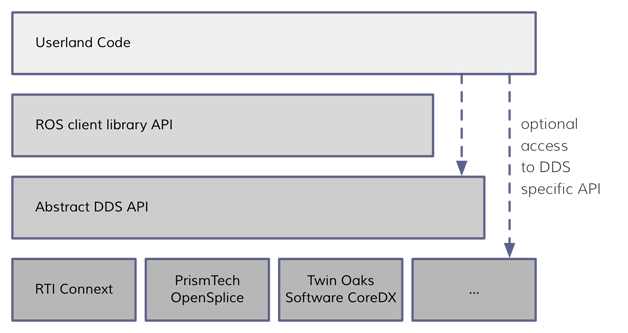
图5 ROS 2.0 DDS
在无人车驾驶系统中, 我们选择依旧基于ROS 1.0 开发,而不是ROS 2.0,主要有以下几点考虑:
- ROS 2.0是一个开发中的框架,很多功能还不是很完整,有待更多的测试与验证。而在无人驾驶环境中,稳定性与安全性是至关重要的,我们需要基于一个经过验证的稳定系统来保证系统的稳定性、安全性和性能,以达到无人车的要求。
- DDS本身的耗费。我们测试了直接在ROS 1.0上使用DDS中间件,其中国防科技大学有一个开源项目MicROS已经做了相关的尝试。但是实验发现在一般的ROS通信场景中(100K发送者接收者通信),ROS on DDS的吞吐率并不及ROS 1.0,主要原因是DDS框架本身的耗费要比ROS多一些,同时用了DDS以后CPU占用率有明显提高。但是我们也确认了使用DDS之后,ROS的QoS高优先级的吞吐率和组播能力有了大幅提升。我们的测试基于PrismTech OpenSplice的社区版,在它的企业版中有针对单机的优化,比如使用了共享内存的优化,我们暂未测试。
- DDS接口的复杂性。DDS本身就是一套庞大的系统,其接口的定义极其复杂,同时文档支持较薄弱。
系统可靠性
如上文所述,系统可靠性是无人驾驶系统最重要的特性。试想几个场景:第一,系统运行时ROSMaster出错退出,导致系统崩溃;第二,其中一个ROS节点出错,导致系统部分功能缺失。以上任何一个场景在无人驾驶环境中都可能造成严重的后果。对于ROS而言,其在工业领域的应用可靠性是非常重要的设计考量,但是目前的ROS设计对这方面考虑得比较少。下面就讨论实时系统的可靠性涉及的一些要素。
去中心化
ROS重要节点需要热备份,以便宕机时可以随时切换。在ROS 1.0的设计中,主节点维护了系统运行所需的连接、参数和主题信息,如果ROS Master宕机了,整个系统就有可能无法正常运行。去中心化的解决方案有很多,如图6所示,我们可以采用主从节点的方式(类似ZooKeeper),同时主节点的写入信息随时备份,主节点宕机后,备份节点被切换为主节点,并且用备份的主节点完成信息初始化。
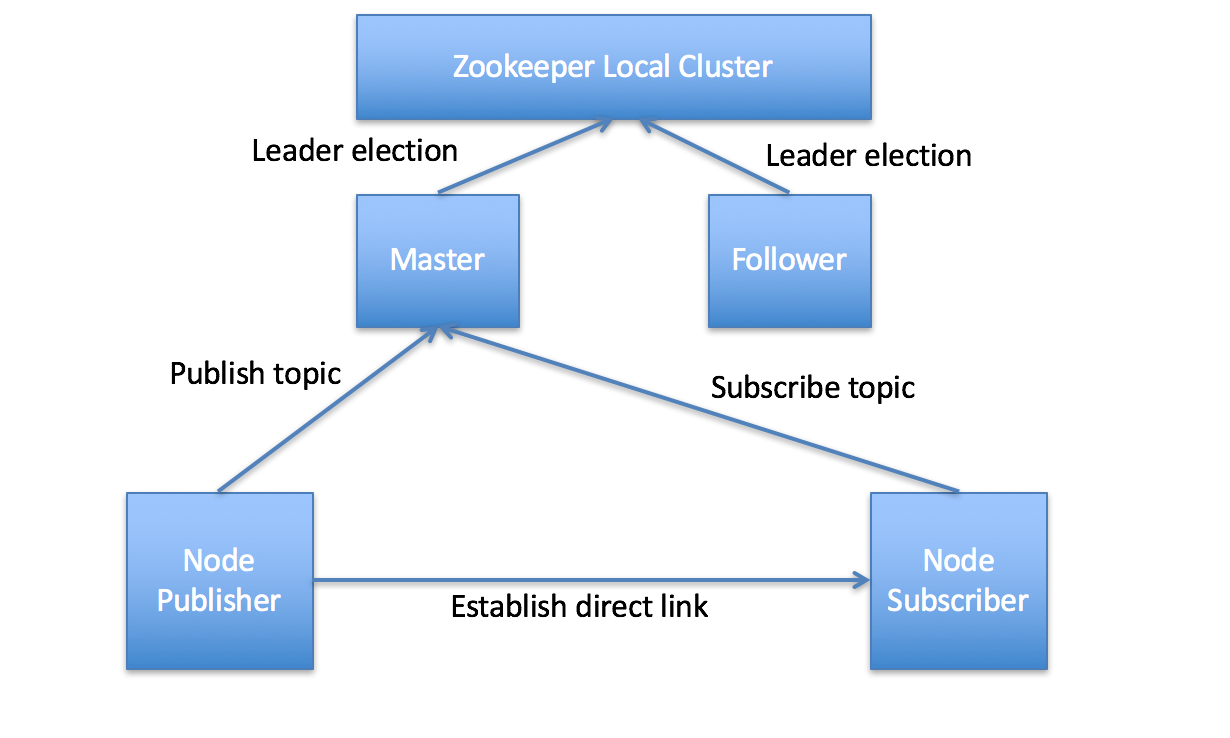
图6 基于ZooKeeper的监控和报警
实时监控和报警
对于运行的节点实时监控其运行数据,并检测到严重的错误信息时报警。目前ROS并没有针对监控做太多的构架考虑,然而这块方面恰恰是最重要的。对于运行时的节点,监控其运行数据,比如应用层统计信息、运行状态等,对将来的调试、错误追踪都有很多好处。如图7所示,实时监控从软件构架来说主要分成3部分:ROS节点层的监控数据API,让开发者能够设置所需的统计信息,通过统一的API进行记录;监控服务端定期从节点获取监控数据(对于紧急的报警信息,节点可以把消息推送给监控服务端);获取到监控数据后,监控服务端对数据进行整合、分析、记录,在察觉到异常信息后报警。
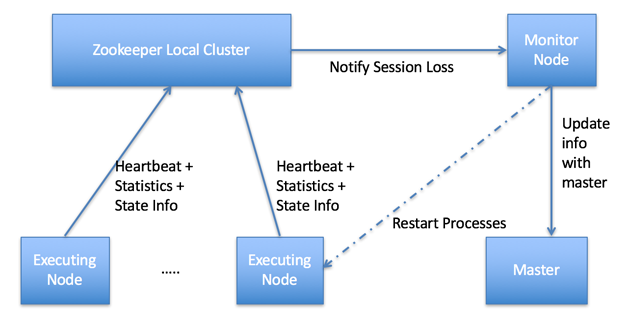
图7 基于ZooKeeper的监控和报警
节点宕机状态恢复
节点宕机的时候,需要通过重启的机制恢复节点,这个重启可以是无状态的,但有些时候也必须是有状态的,因此状态的备份格外重要。节点的宕机检测也是非常重要的,如果察觉到节点宕机,必须很快地使用备份的数据重启。这个功能我们也已经在ZooKeeper框架下实现了。
系统通信性能提升
由于无人驾驶系统模块很多,模块间的信息交互很频繁,提升系统通信性能会对整个系统性能提升的作用很大。我们主要从以下三个方面来提高性能:
第一,目前同一个机器上的ROS节点间的通信使用网络栈的loop-back机制,也就是说每一个数据包都需要经过多层软件栈处理,这将造成不必要的延时(每次20微秒左右)与资源消耗。为了解决这个问题,我们可以使用共享内存的方法把数据memory-map到内存中,然后只传递数据的地址与大小信息,从而把数据传输延时控制在20微秒内,并且节省了许多CPU资源。
第二,现在ROS做数据broadcast的时候,底层实现其实是使用multiple unicast,也就是多个点对点的发送。假如要把数据传给5个节点,那么同样的数据会被拷贝5份。这造成了很大的资源浪费,特别是内存资源的浪费。另外,这样也会对通信系统的吞吐量造成很大压力。为了解决这个问题,我们使用了组播multicast机制:在发送节点和每一接收节点之间实现点对多点的网络连接。如果一个发送节点同时给多个接收节点传输相同的数据,只需复制一份相同的数据包。组播机制提高了数据传送效率,减少了骨干网络出现拥塞的可能性。图8对比了原有的通信机制(灰线)与组播机制(橙色)的性能,随着接收节点数量增加(X轴),原有的通信机制的数据吞吐量急剧下降,而组播机制的数据吞吐量则比较平稳,没有受到严重影响。
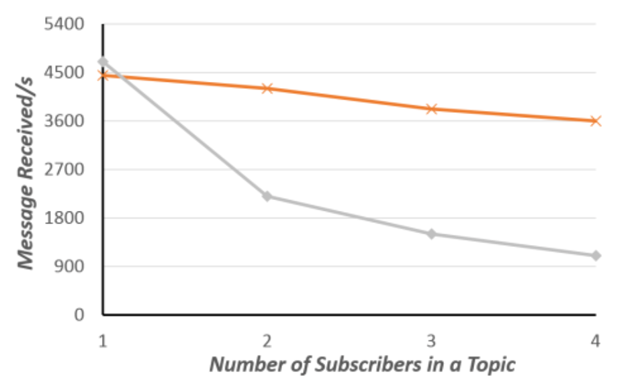
图8 Multicast性能提升
第三,对ROS的通信栈研究,我们发现通信延时很大的损耗是在数据的序列化与反序列化的过程。序列化将内存里对象的状态信息转换为可以存储或传输的形式。在序列化期间,对象将其当前状态写入到临时或持久性存储区。之后,可以通过从存储区中读取或反序列化对象的状态,重新创建该对象。为了解决这个问题,我们使用了轻量级的序列化程序,将序列化的延时降低了50%。
系统资源管理与安全性
如何解决资源分配与安全问题是无人驾驶技术的一个大课题。想象两个简单的攻击场景:第一,其中一个ROS的节点被劫持,然后不断地分配内存,导致系统内存消耗殆尽,造成系统OOM而开始关闭不同的ROS节点进程,从而整个无人驾驶系统崩溃。第二,ROS的topic或者service被劫持, ROS节点之间传递的信息被伪造,导致无人驾驶系统行为异常。
我们选择的方法是使用Linux Container(LXC)来管理每一个ROS节点进程。简单来说,LXC提供轻量级的虚拟化以便隔离进程和资源,而且不需要提供指令解释机制以及全虚拟化等其他复杂功能,相当于C++中的NameSpace。LXC有效地将单个操作系统管理的资源划分到孤立的群组中,以更好地在孤立的群组之间平衡有冲突的资源使用需求。对于无人驾驶场景来说,LXC最大的好处是性能损耗小。我们测试发现,在运行时LXC只造成了5%左右的CPU损耗。
除了资源限制外,LXC也提供了沙盒支持,使得系统可以限制ROS节点进程的权限。为了避免有危险性的ROS节点进程可能破坏其他ROS节点进程的运行,沙盒技术可以限制可能有危险性的ROS节点访问磁盘、内存以及网络资源。另外为了防止节点中的通信被劫持,我们还实现了节点中通信的轻量级加密解密机制,使黑客不能回放或更改通信内容。
结论
要保证一个复杂的系统稳定、高效地运行,每个模块都能发挥出最大的潜能,需要一个成熟有效的管理机制。在无人驾驶场景中,ROS提供了这样一个管理机制,使得系统中的每个软硬件模块都能有效地进行互动。原生的ROS提供了许多必要的功能,但是这些功能并不能满足无人驾驶的所有需求,因此我们在ROS之上进一步地提高了系统的性能与可靠性,完成了有效的资源管理及隔离。我们相信随着无人驾驶技术的发展,更多的系统需求会被提出,比如车车互联、车与城市交通系统互联、云车互联、异构计算硬件加速等,我们也将会持续优化这个系统,力求让它变成无人驾驶的标准系统。
|