| БрМЭЦМі: |
БОЮФжївЊНщЩмСЫ OpenCV жаЕФЭМЯёДІРэШчКЮЪЙгУТЫВЈЦїЖдЭМЯёНјааОэЛ§ЃЈ2D ОэЛ§ЃЉЃЌ
ЯЃЭћЖдФњЕФбЇЯАгаЫљАяжњЁЃ
БОЮФРДздгкВЉПЭдАЃЌгЩЛ№СњЙћШэМўAliceБрМЁЂЭЦМіЁЃ |
|
16 ЭМЯёЦНЛЌ
ФПБъ
1.бЇЯАЪЙгУВЛЭЌЕФЕЭЭЈТЫВЈЦїЖдЭМЯёНјааФЃК§
2.ЪЙгУздЖЈвхЕФТЫВЈЦїЖдЭМЯёНјааОэЛ§ЃЈ2D ОэЛ§ЃЉ
2D ОэЛ§
гывЛЮЌаХКХвЛбљЃЌЮвУЧвВПЩвдЖд 2D ЭМЯёЪЕЪЉЕЭЭЈТЫВЈЃЈLPFЃЉЃЌИпЭЈТЫВЈЃЈHPFЃЉЕШЁЃLPF АяжњЮвУЧШЅГ§дывєЃЌФЃК§ЭМЯёЁЃHPF
АяжњЮвУЧевЕНЭМЯёЕФБпдЕ
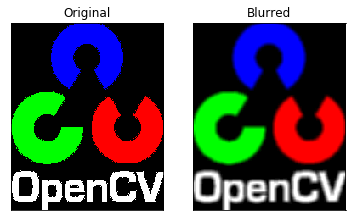
OpenCV ЬсЙЉЕФКЏЪ§ cv.filter2D() ПЩвдШУЮвУЧЖдвЛЗљЭМЯёНјааОэЛ§ВйзїЁЃЯТУцЮвУЧНЋЖдвЛЗљЭМЯёЪЙгУЦНОљТЫВЈЦїЁЃЯТУцЪЧвЛИі
5x5 ЕФЦНОљТЫВЈЦїКЫЃК
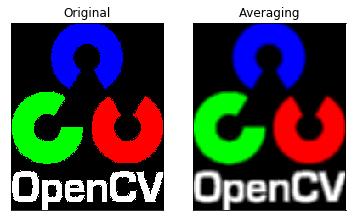
ВйзїШчЯТЃКНЋКЫЗХдкЭМЯёЕФвЛИіЯёЫи A ЩЯЃЌЧѓгыКЫЖдгІЕФЭМЯёЩЯ 25ЃЈ5x5ЃЉИіЯёЫиЕФКЭЃЌдкШЁЦНОљЪ§ЃЌгУетИіЦНОљЪ§ЬцДњЯёЫи
A ЕФжЕЁЃжиИДвдЩЯВйзїжБЕННЋЭМЯёЕФУПвЛИіЯёЫижЕЖМИќаТвЛБпЁЃДњТыШчЯТЃЌдЫаавЛЯТАЩЁЃ
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('opencv_logo.png')
kernel = np.ones((5,5),np.float32)/25
dst = cv2.filter2D(img,-1,kernel)
plt.subplot(121),plt.imshow(img),plt.title('Original')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(dst),plt.title('Averaging')
plt.xticks([]), plt.yticks([])
plt.show() |
НсЙћЃК
ЭМЯёФЃК§ЃЈЭМЯёЦНЛЌЃЉ
ЪЙгУЕЭЭЈТЫВЈЦїПЩвдДяЕНЭМЯёФЃК§ЕФФПЕФЁЃетЖдгыШЅГ§дывєКмгаАяжњЁЃЦфЪЕОЭЪЧШЅГ§ЭМЯёжаЕФИпЦЕГЩЗжЃЈБШШчЃКдывєЃЌБпНчЃЉЁЃЫљвдБпНчвВЛсБЛФЃК§вЛЕуЁЃЃЈЕБШЛЃЌвВгавЛаЉФЃК§ММЪѕВЛЛсФЃК§ЕєБпНчЃЉЁЃOpenCV
ЬсЙЉСЫЫФжжФЃК§ММЪѕЁЃ
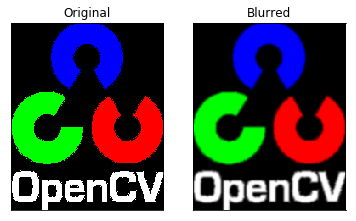
16.1 ЦНОљ
етЪЧгЩвЛИіЙщвЛЛЏОэЛ§ПђЭъГЩЕФЁЃЫћжЛЪЧгУОэЛ§ПђИВИЧЧјгђЫљгаЯёЫиЕФЦНОљжЕРДДњЬцжааФдЊЫиЁЃПЩвдЪЙгУКЏЪ§
cv2.blur() КЭ cv2.boxFilter() РДЭъетИіШЮЮёЁЃПЩвдЭЌПДВщПДЮФЕЕСЫНтИќЖрОэЛ§ПђЕФЯИНкЁЃЮвУЧашвЊЩшЖЈОэЛ§ПђЕФПэКЭИпЁЃЯТУцЪЧвЛИі
3x3 ЕФЙщвЛЛЏОэЛ§ПђЃК
зЂвтЃКШчЙћФуВЛЯыЪЙгУЙщвЛЛЏОэЛ§ПђЃЌФугІИУЪЙгУ cv2.boxFilter()ЃЌетЪБвЊДЋШыВЮЪ§ normalize=FalseЁЃ
ЯТУцгыЕквЛВПЗжвЛбљЕФвЛИіР§згЃК
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('opencv_logo.png')
blur = cv2.blur(img,(5,5))
plt.subplot(121),plt.imshow(img),plt.title('Original')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(blur),plt.title('Blurred')
plt.xticks([]), plt.yticks([])
plt.show() |
НсЙћЃК
16.2 ИпЫЙФЃК§
ЯждкАбОэЛ§КЫЛЛГЩИпЫЙКЫЃЈМђЕЅРДЫЕЃЌЗНПђВЛБфЃЌНЋдРДУПИіЗНПђЕФжЕЪЧЯрЕШЕФЃЌЯждкРяУцЕФжЕЪЧЗћКЯИпЫЙЗжВМЕФЃЌЗНПђжааФЕФжЕзюДѓЃЌЦфгрЗНПђИљОнОрРыжааФдЊЫиЕФОрРыЕнМѕЃЌЙЙГЩвЛИіИпЫЙаЁЩНАќЁЃдРДЕФЧѓЦНОљЪ§ЯждкБфГЩЧѓМгШЈЦНОљЪ§ЃЌШЋОЭЪЧЗНПђРяЕФжЕЃЉЁЃЪЕЯжЕФКЏЪ§ЪЧ
cv2.GaussianBlur()ЁЃЮвУЧашвЊжИЖЈИпЫЙКЫЕФПэКЭИпЃЈБиаыЪЧЦцЪ§ЃЉЁЃвдМАИпЫЙКЏЪ§би XЃЌY
ЗНЯђЕФБъзМВюЁЃШчЙћЮвУЧжЛжИЖЈСЫ X ЗНЯђЕФЕФБъзМВюЃЌY ЗНЯђвВЛсШЁЯрЭЌжЕЁЃШчЙћСНИіБъзМВюЖМЪЧ 0ЃЌФЧУДКЏЪ§ЛсИљОнКЫКЏЪ§ЕФДѓаЁздМКМЦЫуЁЃИпЫЙТЫВЈПЩвдгааЇЕФДгЭМЯёжаШЅГ§ИпЫЙдывєЁЃ
ШчЙћФудИвтЕФЛАЃЌФувВПЩвдЪЙгУКЏЪ§ cv2.getGaussianKernel() здМКЙЙНЈвЛИіИпЫЙКЫЁЃ
ШчЙћвЊЪЙгУИпЫЙФЃК§ЕФЛАЃЌЩЯБпЕФДњТыгІИУаДГЩЃК
#0 ЪЧжИИљОнДАПкДѓаЁЃЈ
5,5 ЃЉРДМЦЫуИпЫЙКЏЪ§БъзМВю
blur = cv2.GaussianBlur(img,(5,5),0) |
НсЙћЃК
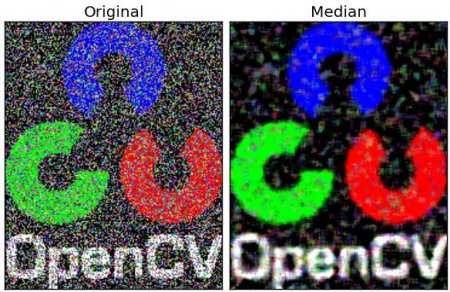
16.3 жажЕФЃК§
ЙЫУћЫМвхОЭЪЧгУгыОэЛ§ПђЖдгІЯёЫиЕФжажЕРДЬцДњжааФЯёЫиЕФжЕЁЃетИіТЫВЈЦїОГЃгУРДШЅГ§НЗбЮдыЩљЁЃЧАУцЕФТЫВЈЦїЖМЪЧгУМЦЫуЕУЕНЕФвЛИіаТжЕРДШЁДњжааФЯёЫиЕФжЕЃЌЖјжажЕТЫВЈЪЧгУжааФЯёЫижмЮЇЃЈвВПЩвдЪЙЫћБОЩэЃЉЕФжЕРДШЁДњЫћЁЃЫћФмгааЇЕФШЅГ§дыЩљЁЃОэЛ§КЫЕФДѓаЁвВгІИУЪЧвЛИіЦцЪ§ЁЃ
дкетИіР§згжаЃЌЮвУЧИјдЪМЭМЯёМгЩЯ 50% ЕФдыЩљШЛКѓдйЪЙгУжажЕФЃК§ЁЃ
ДњТыЃК
median = cv2.medianBlur(img,5)
# дЫаагаЮЪЬтЃЌГіВЛСЫШчЯТНсЙћЃЌЯТЭМЮЊееАсЕФ |
НсЙћЃК
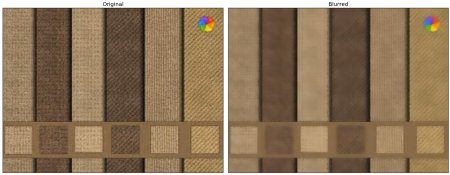
16.4 ЫЋБпТЫВЈ
КЏЪ§ cv2.bilateralFilter() ФмдкБЃГжБпНчЧхЮњЕФЧщПіЯТгааЇЕФШЅГ§дывєЁЃЕЋЪЧетжжВйзїгыЦфЫћТЫВЈЦїЯрБШЛсБШНЯТ§ЁЃЮвУЧвбОжЊЕРИпЫЙТЫВЈЦїЪЧЧѓжааФЕуСкНќЧјгђЯёЫиЕФИпЫЙМгШЈЦНОљжЕЁЃетжжИпЫЙТЫВЈЦїжЛПМТЧЯёЫижЎМфЕФПеМфЙиЯЕЃЌЖјВЛЛсПМТЧЯёЫижЕжЎМфЕФЙиЯЕЃЈЯёЫиЕФЯрЫЦЖШЃЉЁЃЫљвдетжжЗНЗЈВЛЛсПМТЧвЛИіЯёЫиЪЧЗёЮЛгкБпНчЁЃвђДЫБпНчвВЛсБ№ФЃК§ЕєЃЌЖјете§ВЛЪЧЮвУЧЯывЊЁЃЫЋБпТЫВЈдкЭЌЪБЪЙгУПеМфИпЫЙШЈжиКЭЛвЖШжЕЯрЫЦадИпЫЙШЈжиЁЃПеМфИпЫЙКЏЪ§ШЗБЃжЛгаСкНќЧјгђЕФЯёЫиЖджааФЕугагАЯьЃЌЛвЖШжЕЯрЫЦадИпЫЙКЏЪ§ШЗБЃжЛгагыжааФЯёЫиЛвЖШжЕЯрНќЕФВХЛсБЛгУРДзіФЃК§дЫЫуЁЃЫљвдетжжЗНЗЈЛсШЗБЃБпНчВЛЛсБЛФЃК§ЕєЃЌвђЮЊБпНчДІЕФЛвЖШжЕБфЛЏБШНЯДѓЁЃ
НјааЫЋБпТЫВЈЕФДњТыШчЯТЃК
#cv2.bilateralFilter(src,
d, sigmaColor, sigmaSpace)
#d ЈC Diameter of each pixel neighborhood that
is used during filtering.
# If it is non-positive, it is computed from sigmaSpace
#9 СкгђжБОЖЃЌСНИі 75 ЗжБ№ЪЧПеМфИпЫЙКЏЪ§БъзМВюЃЌЛвЖШжЕЯрЫЦадИпЫЙКЏЪ§БъзМВю
blur = cv2.bilateralFilter(img,9,75,75)
# дЫаагаЮЪЬтЃЌГіВЛСЫШчЯТНсЙћЃЌЯТЭМЮЊееАсЕФЁЁЁЁ |
НсЙћЃК
ПДМћСЫАбЃЌЩЯЭМжаЕФЮЦРэБЛФЃК§ЕєСЫЃЌЕЋЪЧБпНчЛЙдкЁЃ
17 аЮЬЌбЇзЊЛЛ
ФПБъ
бЇЯАВЛЭЌЕФаЮЬЌбЇВйзїЃЌР§ШчИЏЪДЃЌХђеЭЃЌПЊдЫЫуЃЌБедЫЫуЕШ
ЮвУЧвЊбЇЯАЕФКЏЪ§гаЃКcv2.erode()ЃЌcv2.dilate()ЃЌcv2.morphologyEx()
дРэ
аЮЬЌбЇВйзїЪЧИљОнЭМЯёаЮзДНјааЕФМђЕЅВйзїЁЃвЛАуЧщПіЯТЖдЖўжЕЛЏЭМЯёНјааЕФВйзїЁЃашвЊЪфШыСНИіВЮЪ§ЃЌвЛИіЪЧдЪМЭМЯёЃЌЕкЖўИіБЛГЦЮЊНсЙЙЛЏдЊЫиЛђКЫЃЌЫќЪЧгУРДОіЖЈВйзїЕФаджЪЕФЁЃСНИіЛљБОЕФаЮЬЌбЇВйзїЪЧИЏЪДКЭХђеЭЁЃЫћУЧЕФБфЬхЙЙГЩСЫПЊдЫЫуЃЌБедЫЫуЃЌЬнЖШЕШЁЃЮвУЧЛсвдЯТЭМЮЊР§ж№вЛНщЩмЫќУЧЁЃ

17.1 ИЏЪД
ОЭЯёЭСШРЧжЪДвЛбљЃЌетИіВйзїЛсАбЧАОАЮяЬхЕФБпНчИЏЪДЕєЃЈЕЋЪЧЧАОАШдШЛЪЧАзЩЋЃЉЁЃетЪЧдѕУДзіЕНЕФФиЃПОэЛ§КЫбизХЭМЯёЛЌЖЏЃЌШчЙћгыОэЛ§КЫЖдгІЕФдЭМЯёЕФЫљгаЯёЫижЕЖМЪЧ
1ЃЌФЧУДжааФдЊЫиОЭБЃГждРДЕФЯёЫижЕЃЌЗёдђОЭБфЮЊСуЁЃ
етЛсВњЩњЪВУДгАЯьФиЃПИљОнОэЛ§КЫЕФДѓаЁППНќЧАОАЕФЫљгаЯёЫиЖМЛсБЛИЏЪДЕєЃЈБфЮЊ
0ЃЉЃЌЫљвдЧАОАЮяЬхЛсБфаЁЃЌећЗљЭМЯёЕФАзЩЋЧјгђЛсМѕЩйЁЃетЖдгкШЅГ§АздыЩљКмгагУЃЌвВПЩвдгУРДЖЯПЊСНИіСЌдквЛПщЕФЮяЬхЕШЁЃ
етРяЮвУЧгавЛИіР§згЃЌЪЙгУвЛИі 5x5 ЕФОэЛ§КЫЃЌЦфжаЫљгаЕФжЕЖМЪЧвдЁЃШУЮвУЧПДПДЫћЪЧШчКЮЙЄзїЕФЃК
import cv2
import numpy as np
img = cv2.imread('j.png',0)
kernel = np.ones((5,5),np.uint8)
erosion = cv2.erode(img,kernel,iterations =
1) |
НсЙћЃК

17.2 ХђеЭ
гыИЏЪДЯрЗДЃЌгыОэЛ§КЫЖдгІЕФдЭМЯёЕФЯёЫижЕжажЛвЊгавЛИіЪЧ 1ЃЌжааФдЊЫиЕФЯёЫижЕОЭЪЧ
1ЁЃЫљвдетИіВйзїЛсдіМгЭМЯёжаЕФАзЩЋЧјгђЃЈЧАОАЃЉЁЃвЛАудкШЅдыЩљЪБЯШгУИЏЪДдйгУХђеЭЁЃвђЮЊИЏЪДдкШЅЕєАздыЩљЕФЭЌЪБЃЌвВЛсЪЙЧАОАЖдЯѓБфаЁЁЃЫљвдЮвУЧдйЖдЫћНјааХђеЭЁЃетЪБдыЩљвбОБЛШЅГ§СЫЃЌВЛЛсдйЛиРДСЫЃЌЕЋЪЧЧАОАЛЙдкВЂЛсдіМгЁЃХђеЭвВПЩвдгУРДСЌНгСНИіЗжПЊЕФЮяЬхЁЃ
| dilation = cv2.dilate(img,kernel,iterations
= 1) |
НсЙћЃК

17.3 ПЊдЫЫу
ЯШНјадИЏЪДдйНјааХђеЭОЭНазіПЊдЫЫуЁЃОЭЯёЮвУЧЩЯУцНщЩмЕФФЧбљЃЌЫќБЛгУРДШЅГ§дыЩљЁЃетРяЮвУЧгУЕНЕФКЏЪ§ЪЧ
cv2.morphologyEx()ЁЃ
| opening = cv2.morphologyEx(img,
cv2.MORPH_OPEN, kernel) |
НсЙћЃК

17.4 БедЫЫу
ЯШХђеЭдйИЏЪДЁЃЫќОГЃБЛгУРДЬюГфЧАОАЮяЬхжаЕФаЁЖДЃЌЛђепЧАОАЮяЬхЩЯЕФаЁКкЕуЁЃ
| closing = cv2.morphologyEx(img,
cv2.MORPH_CLOSE, kernel) |
НсЙћЃК

17.5 аЮЬЌбЇЬнЖШ
ЦфЪЕОЭЪЧвЛЗљЭМЯёХђеЭгыИЏЪДЕФВюБ№ЁЃ
НсЙћПДЩЯШЅОЭЯёЧАОАЮяЬхЕФТжРЊЁЃ
| gradient = cv2.morphologyEx(img,
cv2.MORPH_GRADIENT, kernel) |
НсЙћЃК

17.6 РёУБ
дЪМЭМЯёгыНјааПЊдЫЫужЎКѓЕУЕНЕФЭМЯёЕФВюЁЃЯТУцЕФР§згЪЧгУвЛИі 9x9
ЕФКЫНјааРёУБВйзїЕФНсЙћЁЃ
| tophat = cv2.morphologyEx(img,
cv2.MORPH_TOPHAT, kernel) |
НсЙћЃК

17.7 КкУБ
НјааБедЫЫужЎКѓЕУЕНЕФЭМЯёгыдЪМЭМЯёЕФВюЁЃ
| tophat = cv2.morphologyEx(img,
cv2.MORPH_TOPHAT, kernel) |
НсЙћЃК

17.8 аЮЬЌбЇВйзїжЎМфЕФЙиЯЕ
ЮвУЧАбвдЩЯМЏжааЮЬЌбЇВйзїжЎМфЕФЙиЯЕСаГіРДвдЙЉДѓМвВЮПМЃК
НсЙЙЛЏдЊЫи
дкЧАУцЕФР§згжаЮвУЧЪЙгУ Numpy ЙЙНЈСЫНсЙЙЛЏдЊЫиЃЌЫќЪЧе§ЗНаЮЕФЁЃЕЋгаЪБЮвУЧашвЊЙЙНЈвЛИіЭждВаЮ/дВаЮЕФКЫЁЃЮЊСЫЪЕЯжетжжвЊЧѓЃЌЬсЙЉСЫ
OpenCVКЏЪ§ cv2.getStructuringElement()ЁЃФужЛашвЊИцЫпЫћФуашвЊЕФКЫЕФаЮзДКЭДѓаЁЁЃ
# Rectangular
Kernel
>>> cv2.getStructuringElement(cv2.MORPH_RECT,(5,5))
array([[1, 1, 1, 1, 1],
[1, 1, 1, 1, 1],
[1, 1, 1, 1, 1],
[1, 1, 1, 1, 1],
[1, 1, 1, 1, 1]], dtype=uint8)
# Elliptical Kernel
>>> cv2.getStructuringElement(cv2.MORPH_ELLIPSE,(5,5))
array([[0, 0, 1, 0, 0],
[1, 1, 1, 1, 1],
[1, 1, 1, 1, 1],
[1, 1, 1, 1, 1],
[0, 0, 1, 0, 0]], dtype=uint8)
# Cross-shaped Kernel
>>> cv2.getStructuringElement(cv2.MORPH_CROSS,(5,5))
array([[0, 0, 1, 0, 0],
[0, 0, 1, 0, 0],
[1, 1, 1, 1, 1],
[0, 0, 1, 0, 0],
[0, 0, 1, 0, 0]], dtype=uint8) |
18 ЭМЯёЬнЖШ
ФПБъ
ЭМЯёЬнЖШЃЌЭМЯёБпНчЕШ
ЪЙгУЕНЕФКЏЪ§гаЃКcv2.Sobel()ЃЌcv2.Schar()ЃЌcv2.Laplacian()
ЕШ
дРэ
ЬнЖШМђЕЅРДЫЕОЭЪЧЧѓЕМЁЃ
OpenCV ЬсЙЉСЫШ§жжВЛЭЌЕФЬнЖШТЫВЈЦїЃЌЛђепЫЕИпЭЈТЫВЈЦїЃКSobelЃЌScharr
КЭ LaplacianЁЃЮвУЧЛсвЛвЛНщЩмЫћУЧЁЃ
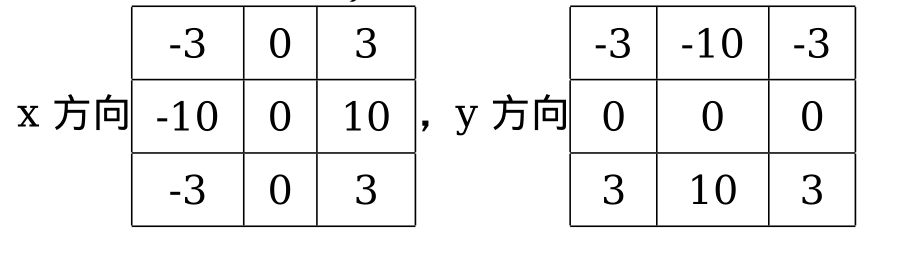
SobelЃЌScharr ЦфЪЕОЭЪЧЧѓвЛНзЛђЖўНзЕМЪ§ЁЃScharr
ЪЧЖд SobelЃЈЪЙгУаЁЕФОэЛ§КЫЧѓНтЧѓНтЬнЖШНЧЖШЪБЃЉЕФгХЛЏЁЃLaplacian ЪЧЧѓЖўНзЕМЪ§ЁЃ
18.1 Sobel ЫузгКЭ Scharr Ыузг
Sobel ЫузгЪЧИпЫЙЦНЛЌгыЮЂЗжВйзїЕФНсКЯЬхЃЌЫљвдЫќЕФПЙдыЩљФмСІКмКУЁЃФуПЩвдЩшЖЈЧѓЕМЕФЗНЯђЃЈxorder
Лђ yorderЃЉЁЃЛЙПЩвдЩшЖЈЪЙгУЕФОэЛ§КЫЕФДѓаЁЃЈksizeЃЉЁЃШчЙћ ksize=-1ЃЌЛсЪЙгУ 3x3
ЕФ Scharr ТЫВЈЦїЃЌЫќЕФЕФаЇЙћвЊБШ 3x3 ЕФ Sobel ТЫВЈЦїКУЃЈЖјЧвЫйЖШЯрЭЌЃЌЫљвддкЪЙгУ
3x3 ТЫВЈЦїЪБгІИУОЁСПЪЙгУ Scharr ТЫВЈЦїЃЉЁЃ3x3 ЕФ Scharr ТЫВЈЦїОэЛ§КЫШчЯТЃК
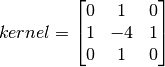
18.2 Laplacian Ыузг
РЦеРЫЙЫузгПЩвдЪЙгУЖўНзЕМЪ§ЕФаЮЪНЖЈвхЃЌПЩМйЩшЦфРыЩЂЪЕЯжРрЫЦгкЖўНз
Sobel ЕМЪ§ЃЌЪТЪЕЩЯЃЌOpenCV дкМЦЫуРЦеРЫЙЫузгЪБжБНгЕїгУ Sobel ЫузгЁЃМЦЫуЙЋЪНШчЯТЃК

РЦеРЫЙТЫВЈЦїЪЙгУЕФОэЛ§КЫЃК
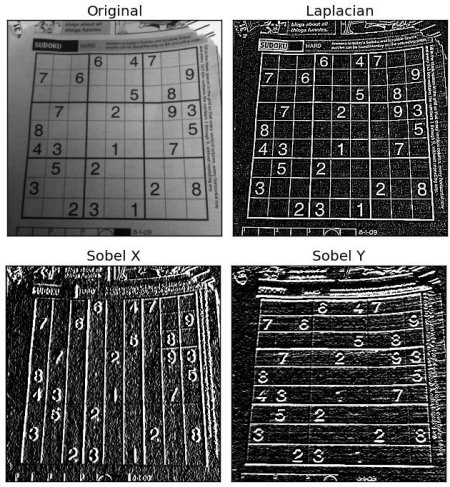
ДњТы
ЯТУцЕФДњТыЗжБ№ЪЙгУвдЩЯШ§жжТЫВЈЦїЖдЭЌвЛЗљЭМНјааВйзїЁЃЪЙгУЕФОэЛ§КЫЖМЪЧ
5x5 ЕФЁЃ
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('dave.jpg',0)
laplacian = cv2.Laplacian(img,cv2.CV_64F)
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=5)
sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=5)
plt.subplot(2,2,1),plt.imshow(img,cmap = 'gray')
plt.title('Original'), plt.xticks([]), plt.yticks([])
plt.subplot(2,2,2),plt.imshow(laplacian,cmap
= 'gray')
plt.title('Laplacian'), plt.xticks([]), plt.yticks([])
plt.subplot(2,2,3),plt.imshow(sobelx,cmap =
'gray')
plt.title('Sobel X'), plt.xticks([]), plt.yticks([])
plt.subplot(2,2,4),plt.imshow(sobely,cmap =
'gray')
plt.title('Sobel Y'), plt.xticks([]), plt.yticks([])
plt.show() |
НсЙћЃК
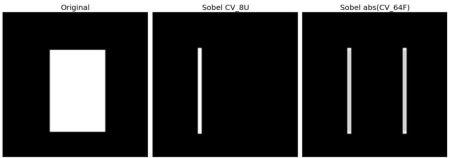
вЛИіживЊЕФЪТ!
дкВщПДЩЯУцетИіР§згЕФзЂЪЭЪБВЛжЊЕРФугаУЛгазЂвтЕНЃКЕБЮвУЧПЩвдЭЈЙ§ВЮЪ§
-1 РДЩшЖЈЪфГіЭМЯёЕФЩюЖШЃЈЪ§ОнРраЭЃЉгыдЭМЯёБЃГжвЛжТЃЌЕЋЪЧЮвУЧдкДњТыжаЪЙгУЕФШДЪЧ cv2.CV_64FЁЃетЪЧЮЊЪВУДФиЃПЯыЯѓвЛЯТвЛИіДгКкЕНАзЕФБпНчЕФЕМЪ§ЪЧећЪ§ЃЌЖјвЛИіДгАзЕНКкЕФБпНчЕуЕМЪ§ШДЪЧИКЪ§ЁЃШчЙћдЭМЯёЕФЩюЖШЪЧnp.int8
ЪБЃЌЫљгаЕФИКжЕЖМЛсБЛНиЖЯБфГЩ 0ЃЌЛЛОфЛАЫЕОЭЪЧАбАбБпНчЖЊЪЇЕєЁЃЫљвдШчЙћетСНжжБпНчФуЖМЯыМьВтЕНЃЌзюКУЕФЕФАьЗЈОЭЪЧНЋЪфГіЕФЪ§ОнРраЭЩшжУЕФИќИпЃЌБШШч
cv2.CV_16SЃЌcv2.CV_64F ЕШЁЃШЁОјЖджЕШЛКѓдйАбЫќзЊЛиЕН cv2.CV_8UЁЃЯТУцЕФЪОР§бнЪОСЫЪфГіЭМЦЌЕФЩюЖШВЛЭЌдьГЩЕФВЛЭЌаЇЙћЁЃ
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('box.png',0)
# Output dtype = cv2.CV_8U
sobelx8u = cv2.Sobel(img,cv2.CV_8U,1,0,ksize=5)
# Output dtype = cv2.CV_64F. Then take its
absolute and convert to cv2.CV_8U
sobelx64f = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=5)
abs_sobel64f = np.absolute(sobelx64f)
sobel_8u = np.uint8(abs_sobel64f)
plt.subplot(1,3,1),plt.imshow(img,cmap = 'gray')
plt.title('Original'), plt.xticks([]), plt.yticks([])
plt.subplot(1,3,2),plt.imshow(sobelx8u,cmap
= 'gray')
plt.title('Sobel CV_8U'), plt.xticks([]), plt.yticks([])
plt.subplot(1,3,3),plt.imshow(sobel_8u,cmap
= 'gray')
plt.title('Sobel abs(CV_64F)'), plt.xticks([]),
plt.yticks([])
plt.show() |
НсЙћЃК
|